Artificial finger driving structure
A driving structure and artificial finger technology, applied in prosthesis, medical science, etc., to achieve the effect of small size, high transmission efficiency and good performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
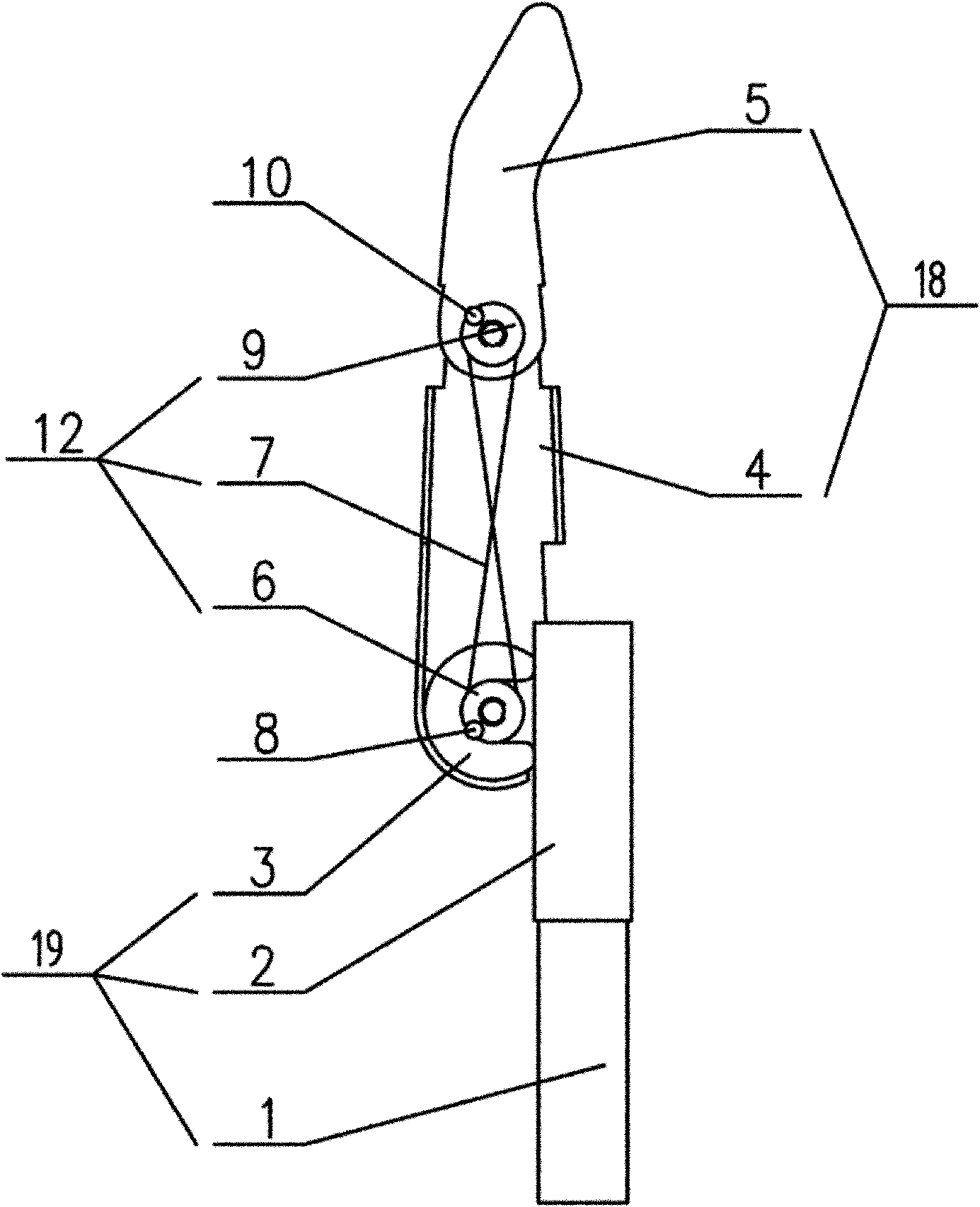
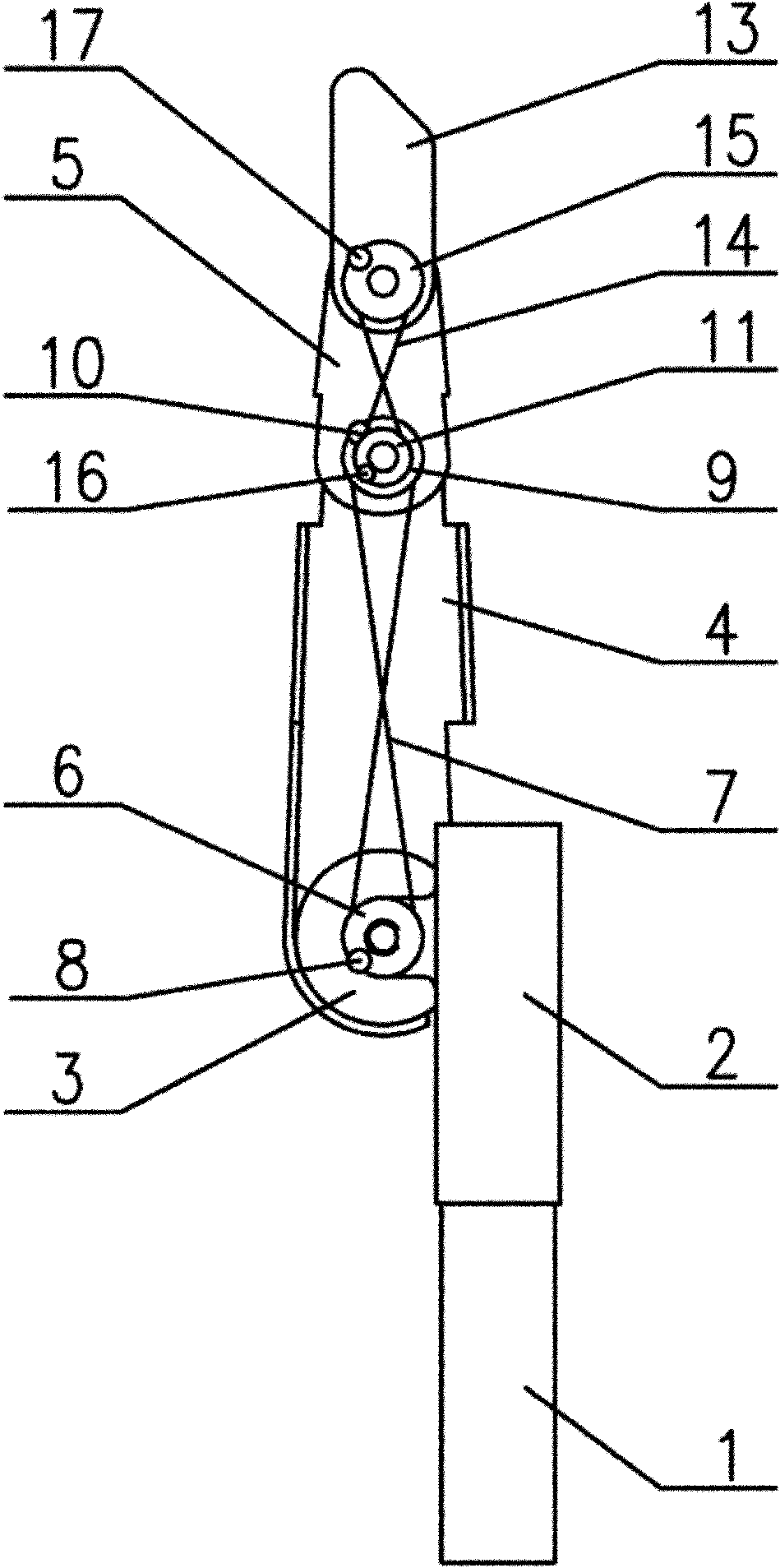
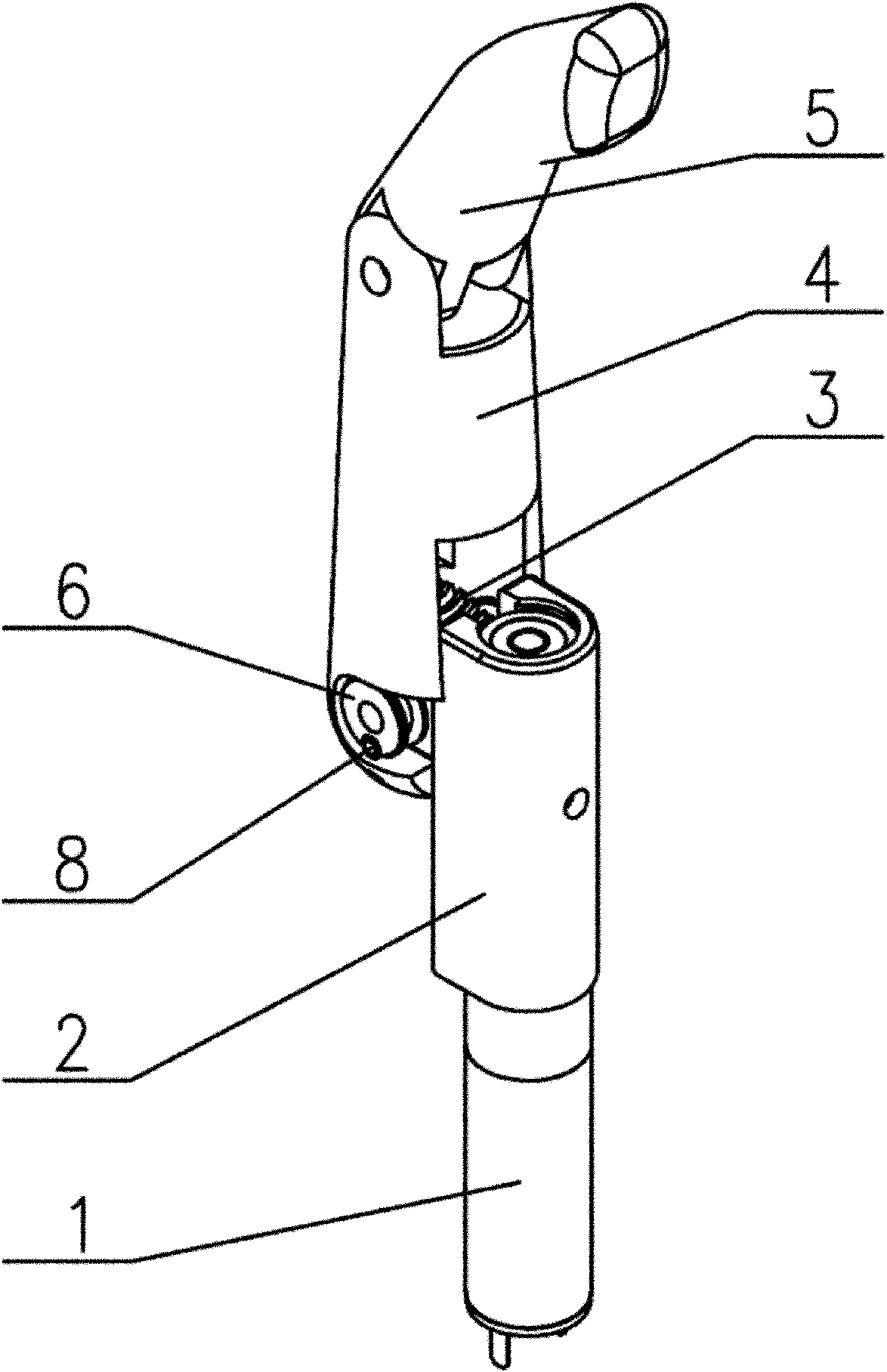
[0018] In order to understand the technical content of the present invention more clearly, the following examples are given in detail. The five fingers of the bionic hand must be able to move independently, and each finger must have an independent driving mechanism. The five fingers are different in length and thickness, but the driving principle can be the same. Now illustrate its structural features with a finger. figure 1 It is a schematic diagram of the specific implementation of the driving structure of the fingers of the two-knuckle bionic prosthetic hand of the present invention; figure 2 A schematic diagram of the specific implementation of the driving structure of the fingers of the three-knuckle bionic prosthetic hand of the present invention; image 3 It is an outline drawing of the driving structure of the fingers of the two-knuckle bionic artificial hand of the present invention. In the drawings of the driving structure of the fingers of the bionic prosthetic h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com