Robotic arms with coaxially mounted helical spring means
一种机器人臂、弹簧装置的技术,应用在外科机器人、爪臂、机械手等方向,能够解决增加构造复杂度等问题,达到结构简单、快速和简单构造、降低成本的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
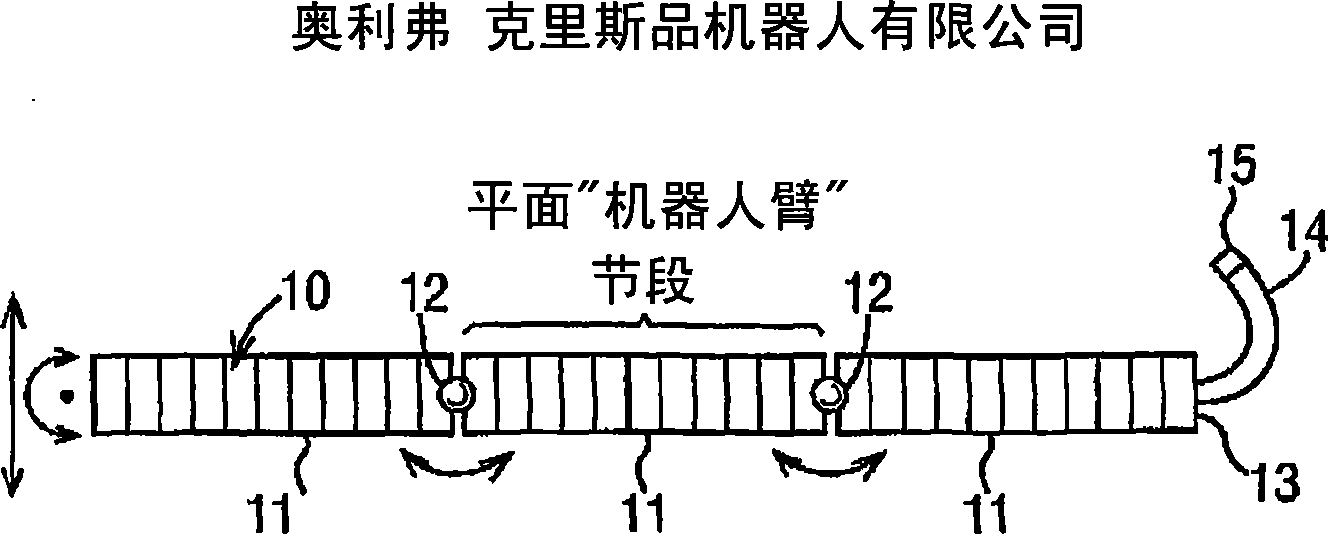
[0065] refer to figure 1 and 2, the arm as shown comprises three segments 10, each segment 10 comprising a plurality of link elements 11. Each segment 10 is connected to its adjacent segment by an articulating joint 12 . The distal end 13 of the arm carries a working head 14 comprising a tool 15 .
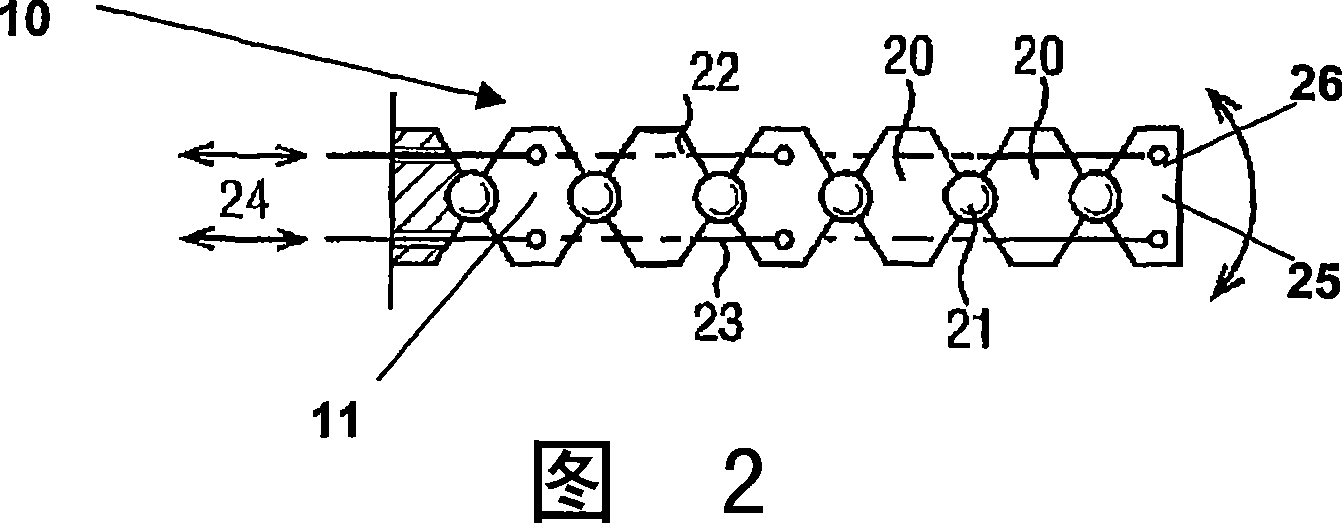
[0066] Each link 11 is capable of limited movement relative to its adjacent segments by means of articulating joints 21 (see Figure 2), and the segments 10 as a whole are controlled by control lines 22 and 23 which extend through the intermediate links 11 and is fixedly attached to the end element 25 of the segment 10. Each control wire extends to an actuating means generally indicated at 24 in Figure 2, which is controllable to provide a variable tension on each control wire. In normal operation, each control wire 22 and 23 is held under slight tension to apply a slight compressive force to the articulating link joint 21 . To move the segment, a suitable actuating device appli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com