Mini micro-acoustic wall-climbing robot based on vacuum adsorption principle
A wall-climbing robot and vacuum adsorption technology, which is applied in the field of wall-climbing robots, can solve problems such as difficult cable-free, high energy consumption, and difficulty in meeting practical application requirements in the field of anti-terrorism investigation, and achieve the effect of ensuring rapidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention is described in more detail below in conjunction with accompanying drawing example:
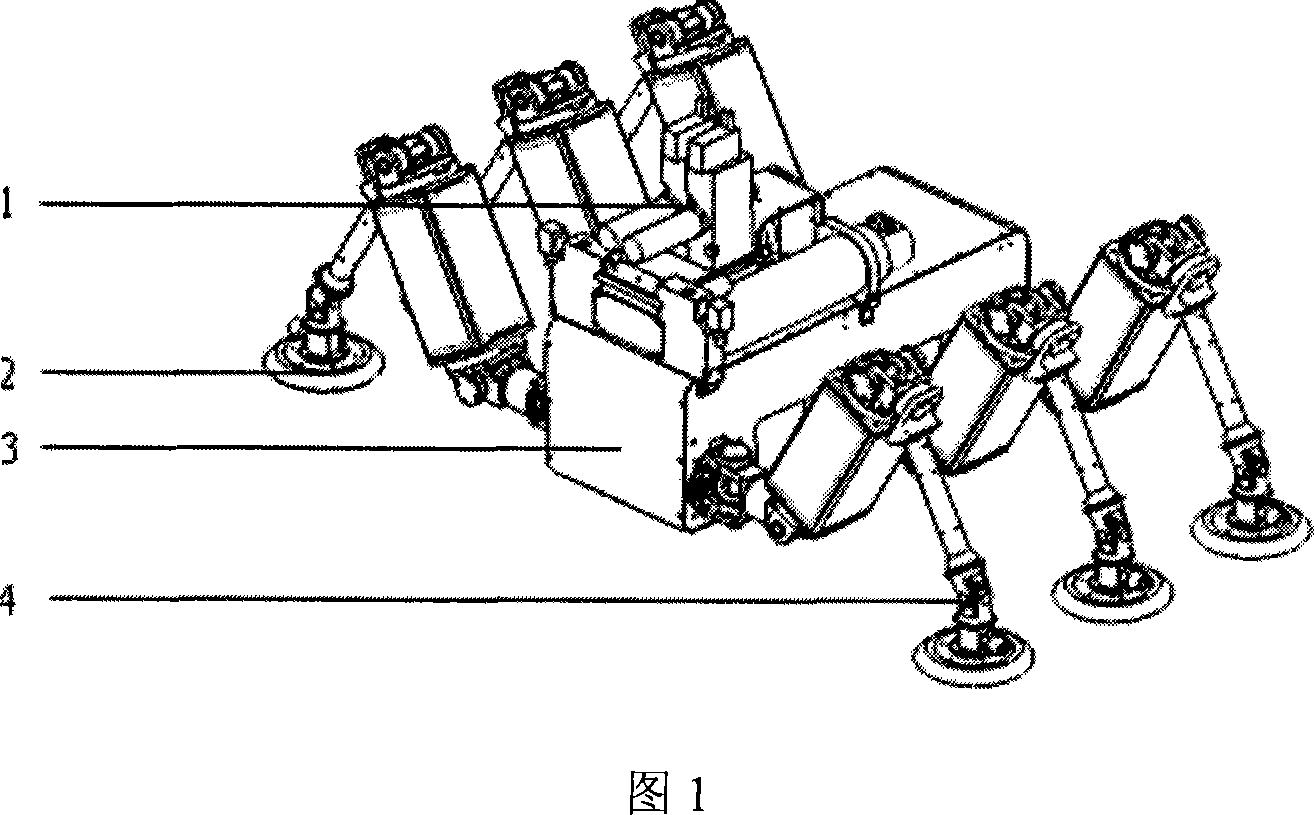
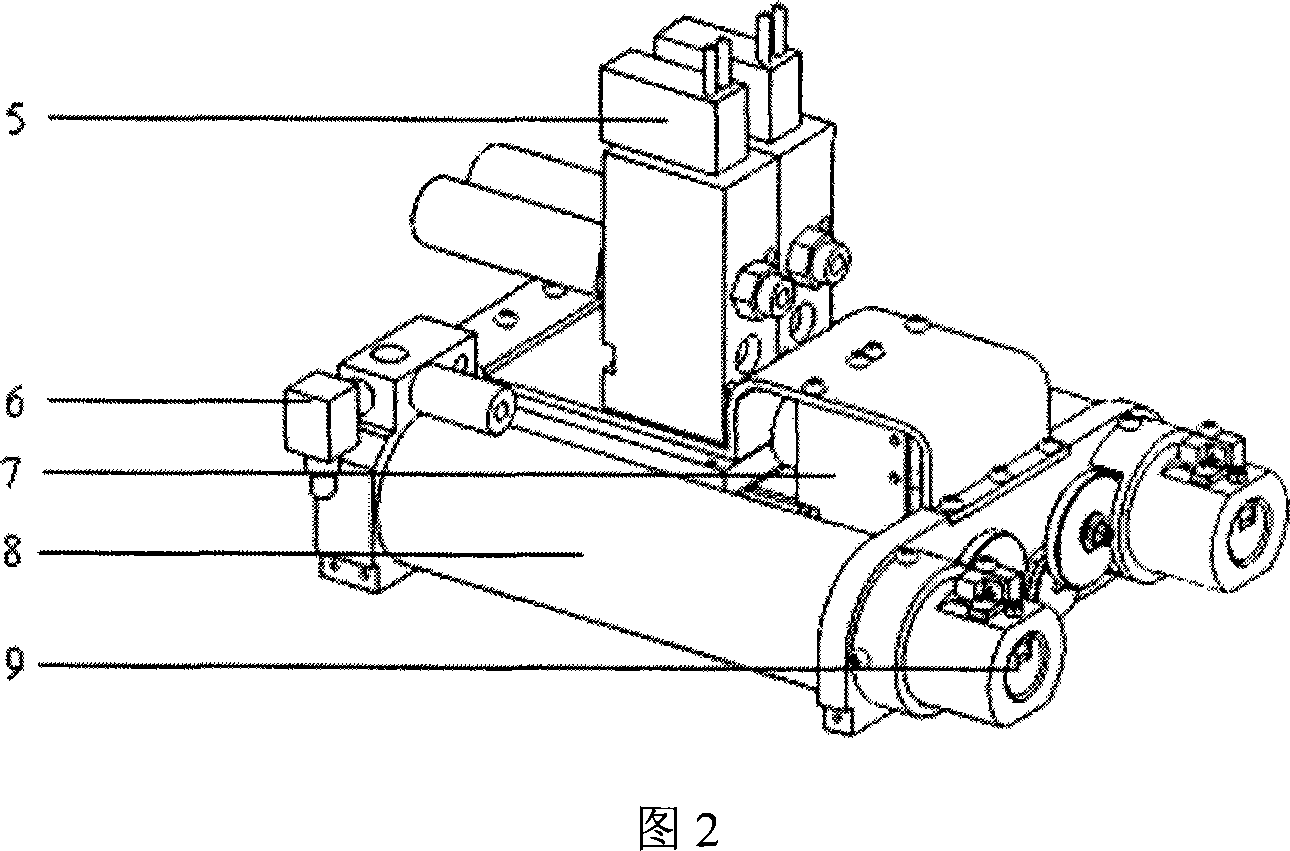
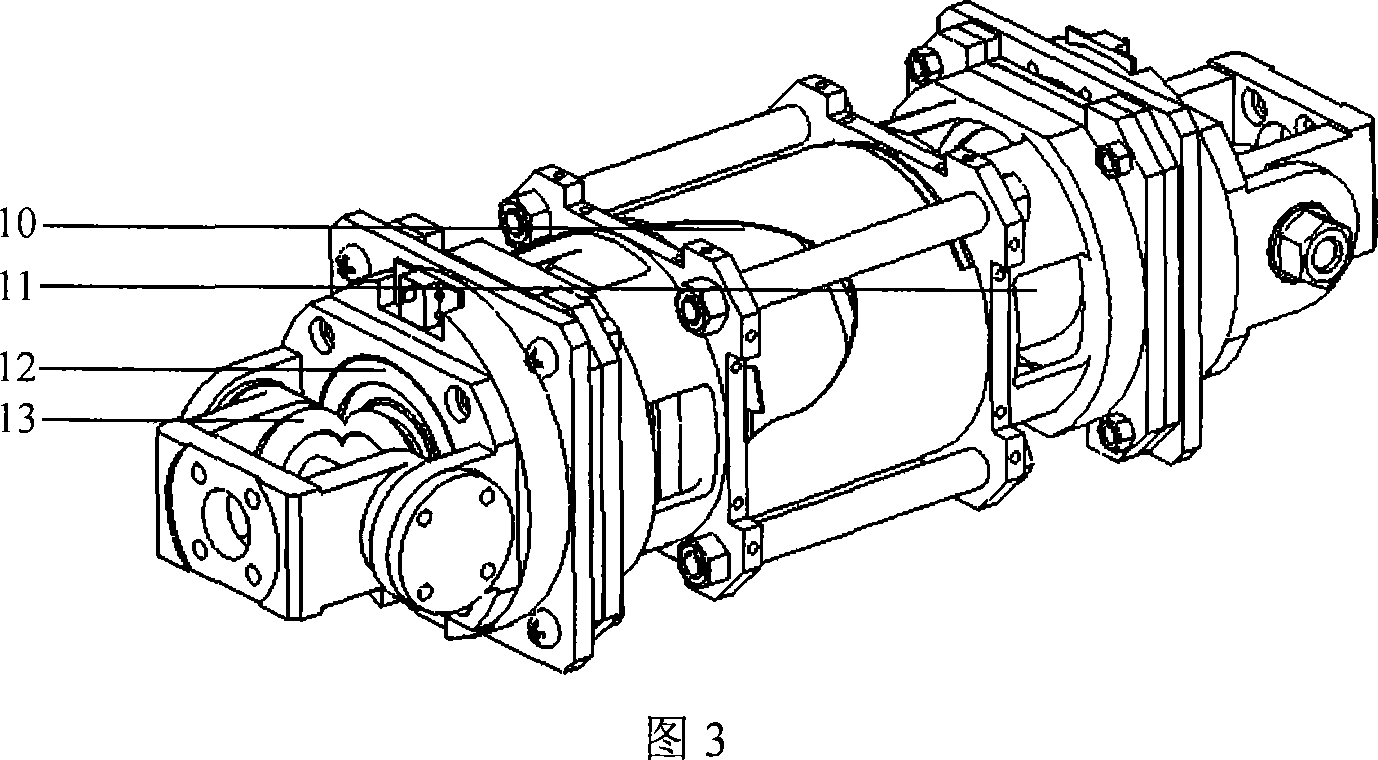
[0024] 1, the micro-acoustic wall-climbing robot based on the principle of vacuum adsorption consists of a moving mechanism 3, a vacuum generating mechanism 1 mounted on the moving mechanism and a suction cup 2 mounted on the moving mechanism through a passive joint 4. In conjunction with FIG. 2 , the vacuum generating mechanism includes a one-way plunger pump 8 with a driving motor, a diaphragm pump 7 connected to the one-way plunger pump, and a two-position three-way valve 5 . Combined with Fig. 3 at the same time, the mobile mechanism is a hexapod walking structure, and the driving joint of each foot is composed of a motor 10, a harmonic reducer 11 installed at both ends of the motor, a planetary reducer 12 connected with the harmonic reducer and a planetary reducer The bevel gear 13 connected to the device forms a module, and the two ends of the module are res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com