Open-type network robot universal control systems
A general-purpose control and robot technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems that are lacking, have not yet appeared, and cannot achieve network robots and network sensors, and achieve the effect of simplifying interaction and solving data packet integrity problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
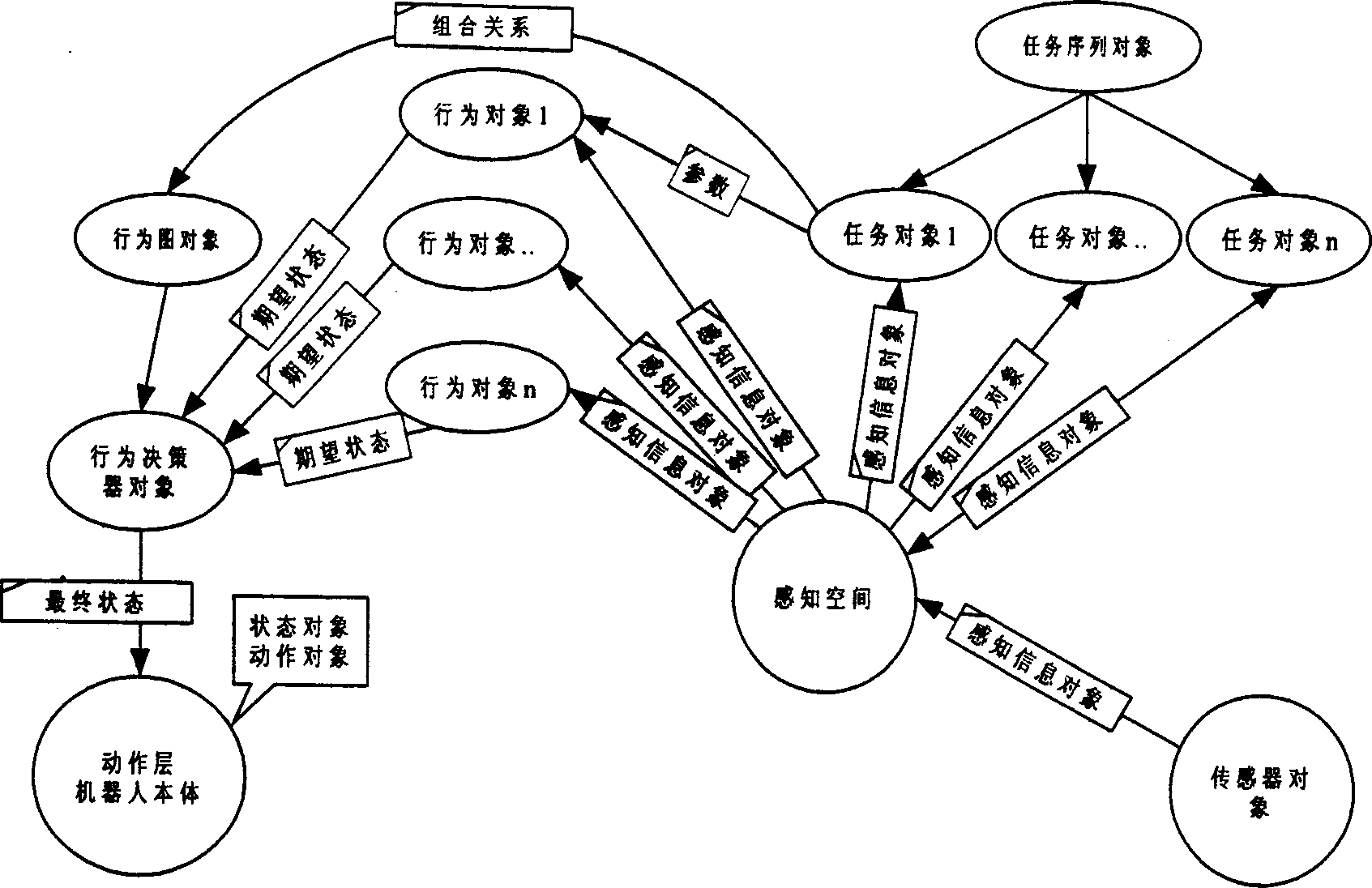
[0019] The open network robot general control system is mainly used in the design and manufacture of robots and the research fields of robot intelligence. It uses distributed object and remote interface technology to establish a general distributed object model for network robots, and defines the base class objects and interfaces of the following distributed objects, such as figure 1 Shown: action object and setting action value interface, state object and setting state interface, behavior object and output expected state interface, behavior graph object and traversal behavior interface, behavior decision maker object and decision interface, task object and execution task interface , task sequence object and traversal task interface, perception space object and input and output perception information interface, perception info...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com