Design method of single-degree-of-freedom six-rod mechanism with mixed pose constraints
A six-bar mechanism and design method technology, applied in geometric CAD and other directions, can solve problems such as not checking the single-degree-of-freedom six-bar mechanism, and not being able to obtain the target trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The present invention will be further described below in conjunction with accompanying drawing.
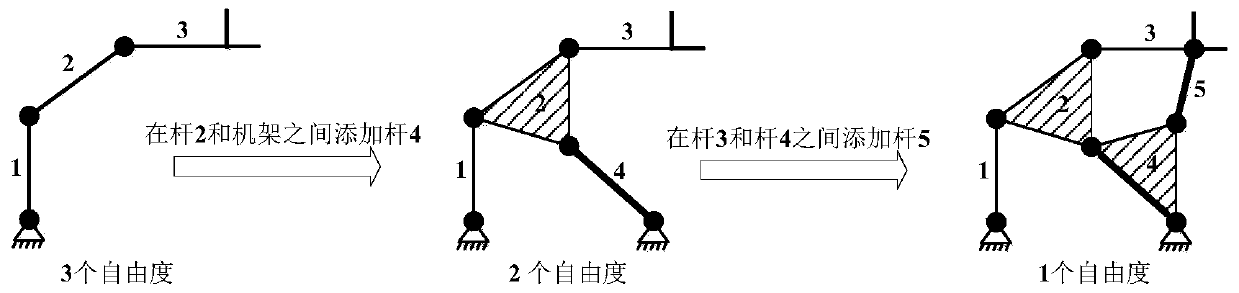
[0088] Such as figure 1 As shown, the overall design idea of the single-degree-of-freedom six-bar mechanism is as follows: firstly, a 3R open chain 1-2-3 is given; a bar 4 is added between the bar 2 and the frame, so that the degrees of freedom are reduced from 3 to 2; add rod 5 between rod 4 and rod 3, and finally obtain a single-degree-of-freedom six-bar mechanism, whose end effector can pass Z poses precisely and approximately K poses.
[0089] The motion synthesis method of a single-degree-of-freedom six-bar mechanism with mixed pose constraints, the specific steps are as follows:
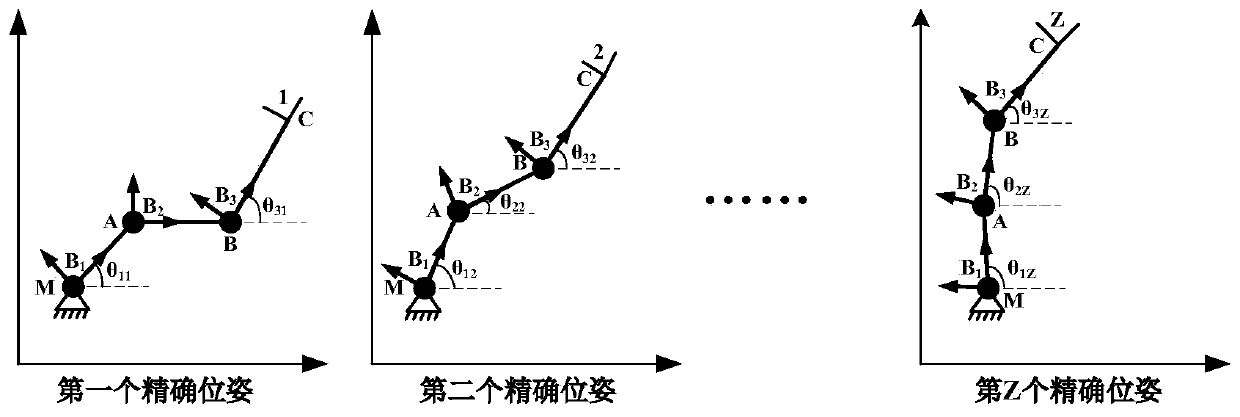
[0090] Step 1: In the target trajectory to be achieved, select Z+K poses, and stipulate that Z (Z<5) poses pass accurately, and K poses pass approximately.
[0091] Step 2: Through simulation or experiment, a 3R open chain rod group is given; the 3R open chain rod group includes the head...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com