Grabbing equipment for intelligent machine manufacturing
A technology of intelligent machinery and equipment, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problem that the system is difficult to complete tasks accurately and efficiently, and achieve the effect of accurately and efficiently grabbing workpieces
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions in the embodiments of the present invention will be clearly and completely described below. Obviously, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
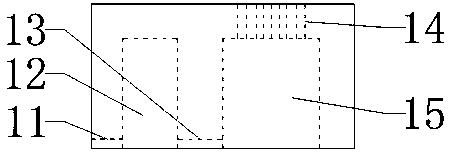
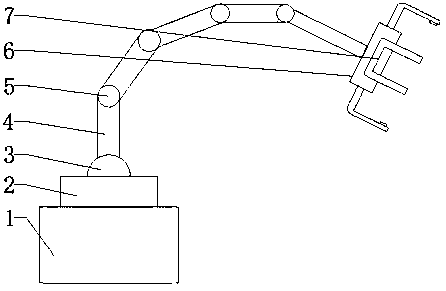
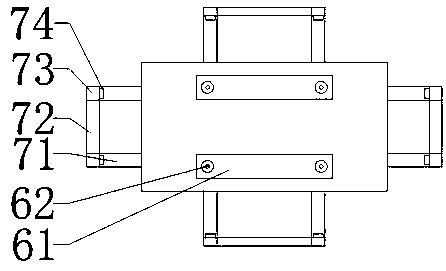
[0021] see Figure 1~3 , in an embodiment of the present invention, an intelligent mechanical manufacturing grabbing device includes a base 1, a turntable 2, a rotating member 3, a mechanical arm 4, a mechanical joint 5, a manipulator 6, a gripper 7, an external power cord 11, and a switching power supply 12 , low-voltage transmission line 13, signal line 14, industrial computer 15, binocular camera 61, camera lens 62, telescoping rod 71, connecting rod 72, pressure plate 73 and pressure sensor 74, turntable 2 is installed on the de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com