Swarm robot target searching method based on implicit information interaction mode
A technology for information interaction and target search, applied in location-based services, geographic information databases, machine-to-machine/machine-type communication services, etc. It can solve channel interference, robots cannot share individual information, and cannot reflect group advantages. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The target search method of group robots of the present invention refers to that a plurality of robots cooperate with each other to complete the search task under the condition that only the geographical location and the size of the search area are known, and the distribution of the targets is unknown.
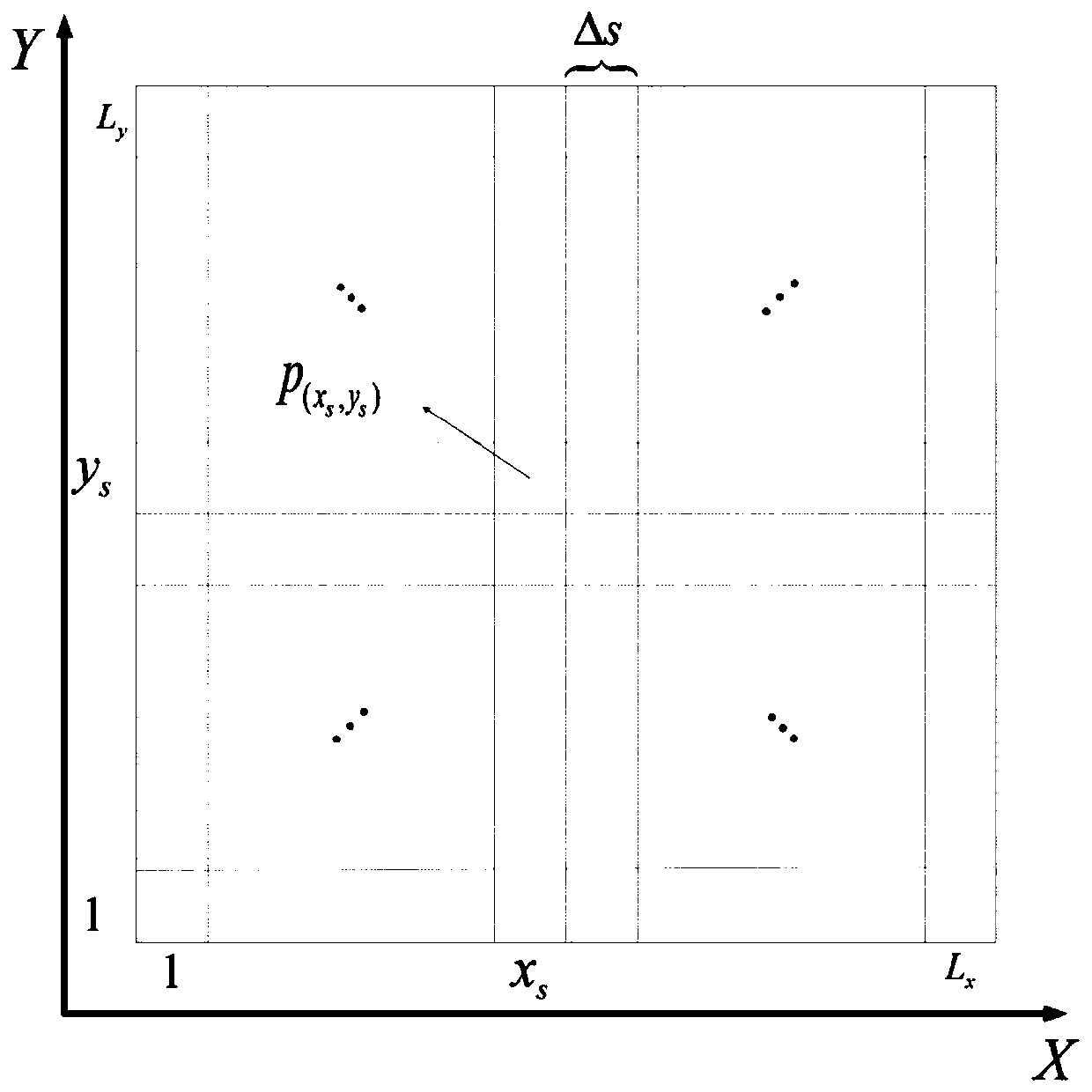
[0029] Step 1: Set the search area S∈R 2 Gridded to L according to a fixed interval Δs x × L y square discrete units, and each grid is denoted as s c =(x s ,y s ), where x s ∈{1,2,3,...,L x},y s ∈{1,2,3,...,L y}; According to the rasterized search area, a search map is established for each robot, and the search perception map reflects the robot's understanding and cognition of the current search environment. A structure for searching each raster information in the map Indicates that the structure represents the grid s c The coordinate position in the two-dimensional plane and the probability that the target exists in this grid.
[0030] As time goes by, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com