Modeling and static balancing method and device for a two-wheeled robot based on trailing distance
A technology for robots and robotic systems, applied in constraint-based CAD, instrument, geometric CAD, etc., to solve problems such as small attraction domain, insufficient model to analyze drag distance, and poor robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
[0080] The method and device for modeling and static balancing of a two-wheeled robot based on trailing distance proposed according to an embodiment of the present invention will be described below with reference to the accompanying drawings.
[0081] Firstly, a method for modeling and static balancing of a two-wheeled robot based on a trailing distance proposed according to an embodiment of the present invention will be described with reference to the accompanying drawings.
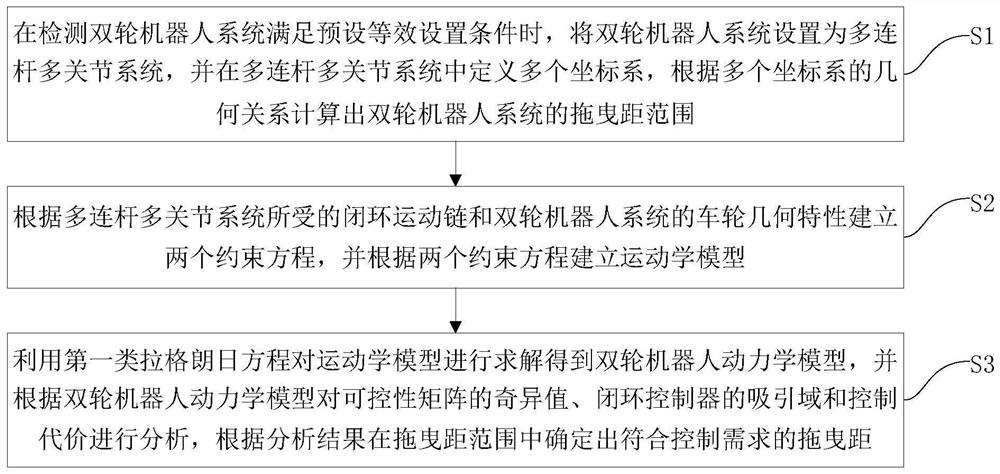
[0082] figure 1 It is a flow chart of a two-wheeled ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com