Robot and repositioning method thereof
A robot and relocation technology, applied in the direction of instrument, two-dimensional position/course control, vehicle position/route/altitude control, etc., can solve the problems of algorithm convergence error value, unsuitable for finding the global optimal problem, etc., and achieve the algorithm Simple and effective, avoiding the effect of task failure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to make the purpose, technical solutions and advantages of the present invention clearer, the implementation method of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments, so as to solve technical problems and achieve technical effects by applying technical means to the present invention. The process is well understood and implemented accordingly.
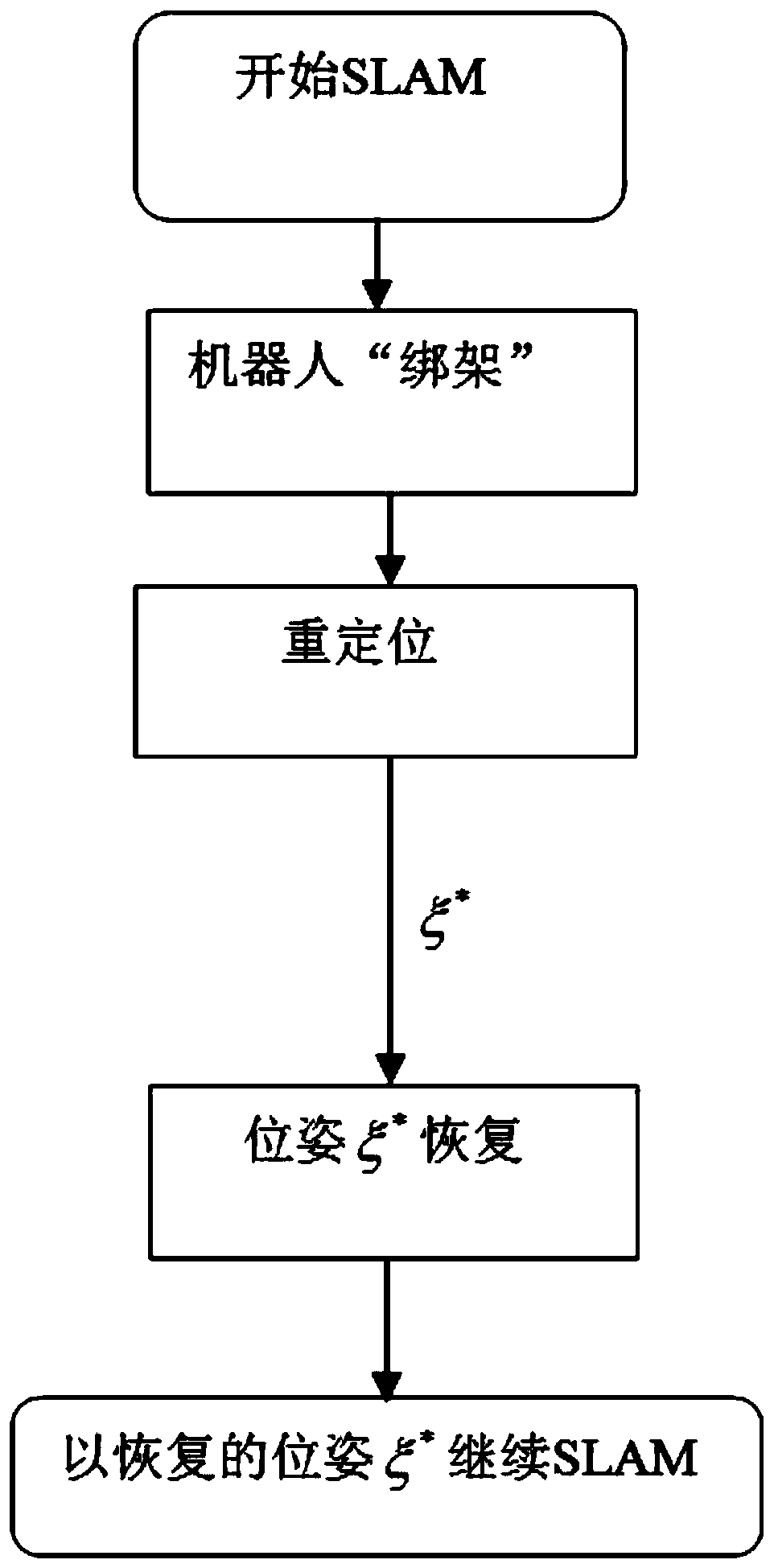
[0061] In the prior art, non-linear optimal scan matching is usually used for robot relocation. The non-linear optimization scan matching is based on the minimum mismatch between the current frame radar data occupancy grid probability and the map occupancy grid probability, and solves the pose and mapping through nonlinear optimization iteratively. However, nonlinear optimization requires an estimated initial value, and then searches for a local optimal value near the initial value. If the estimated initial value is not near the global optimal value, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com