Inner hole expansion grabbing mechanism
A grasping mechanism and a technology of expansion and tightening, which is applied in the field of inner hole expansion and tightening grasping mechanism, can solve problems such as difficulties, complex operating environment, not large enough, and can only effectively grasp single-layer workpieces, etc., to achieve shrinkage and dimensional stability , Small and compact space, strong mechanism rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Specific embodiments of the present disclosure will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present disclosure, and are not intended to limit the present disclosure.
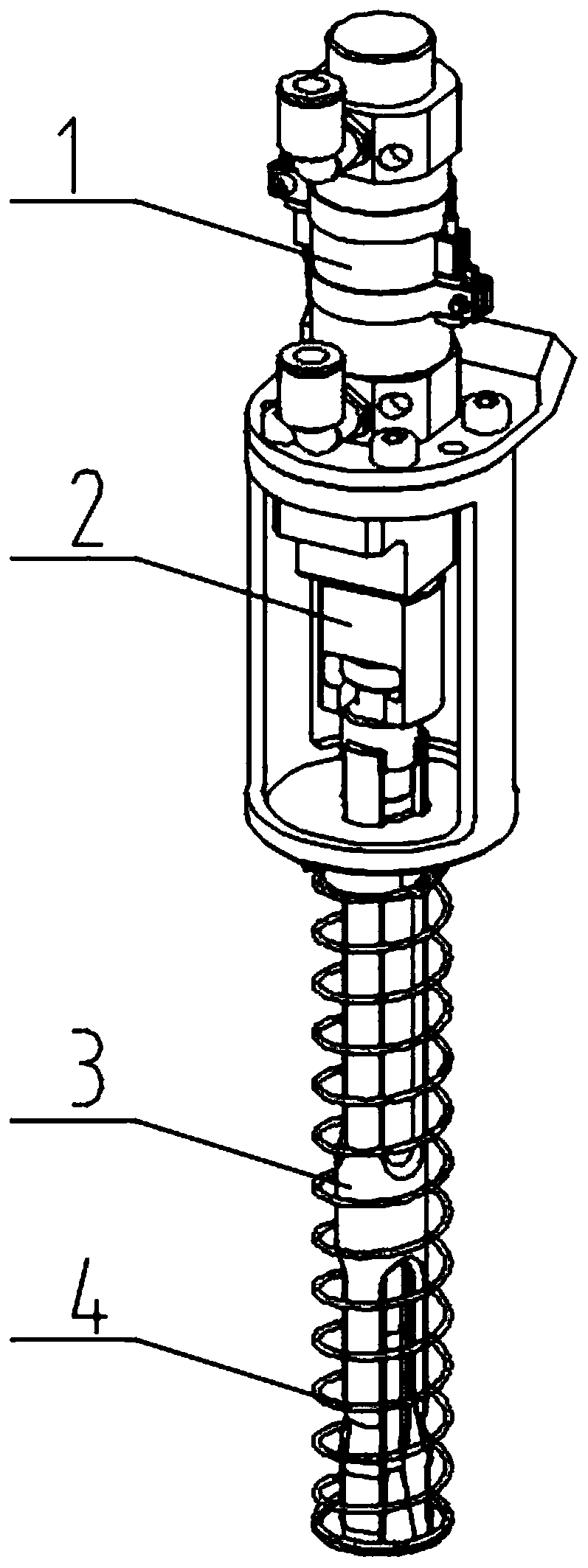
[0033] In this disclosure, unless stated otherwise, the used orientation words such as "up, down" are generally defined based on the orientation or positional relationship shown in the drawings, specifically refer to figure 1 The directions shown in the drawings are combined with the positional relationship of corresponding components in other drawings. When the following description refers to the accompanying drawings, the same numerals in different drawings refer to the same or similar elements unless otherwise indicated.
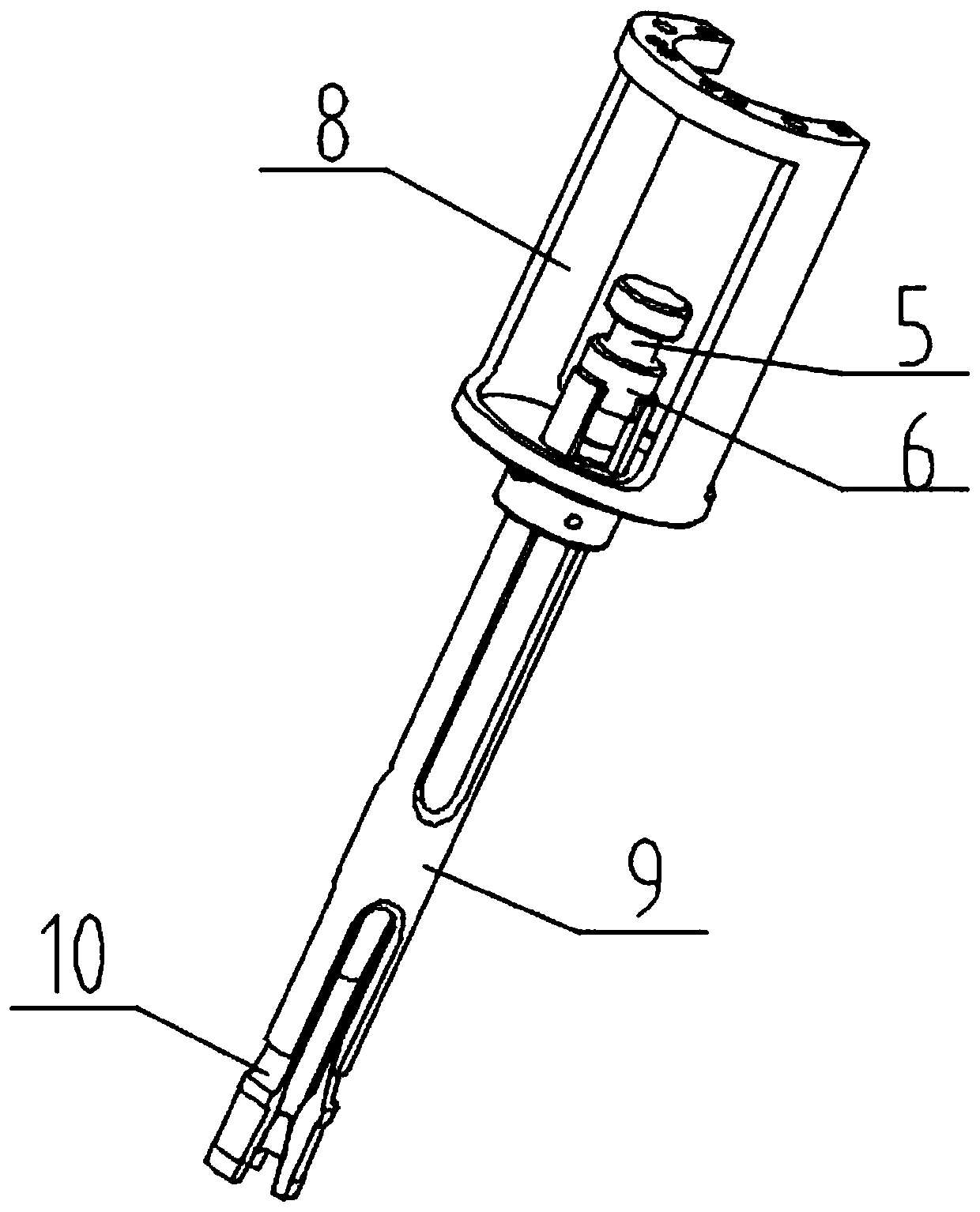
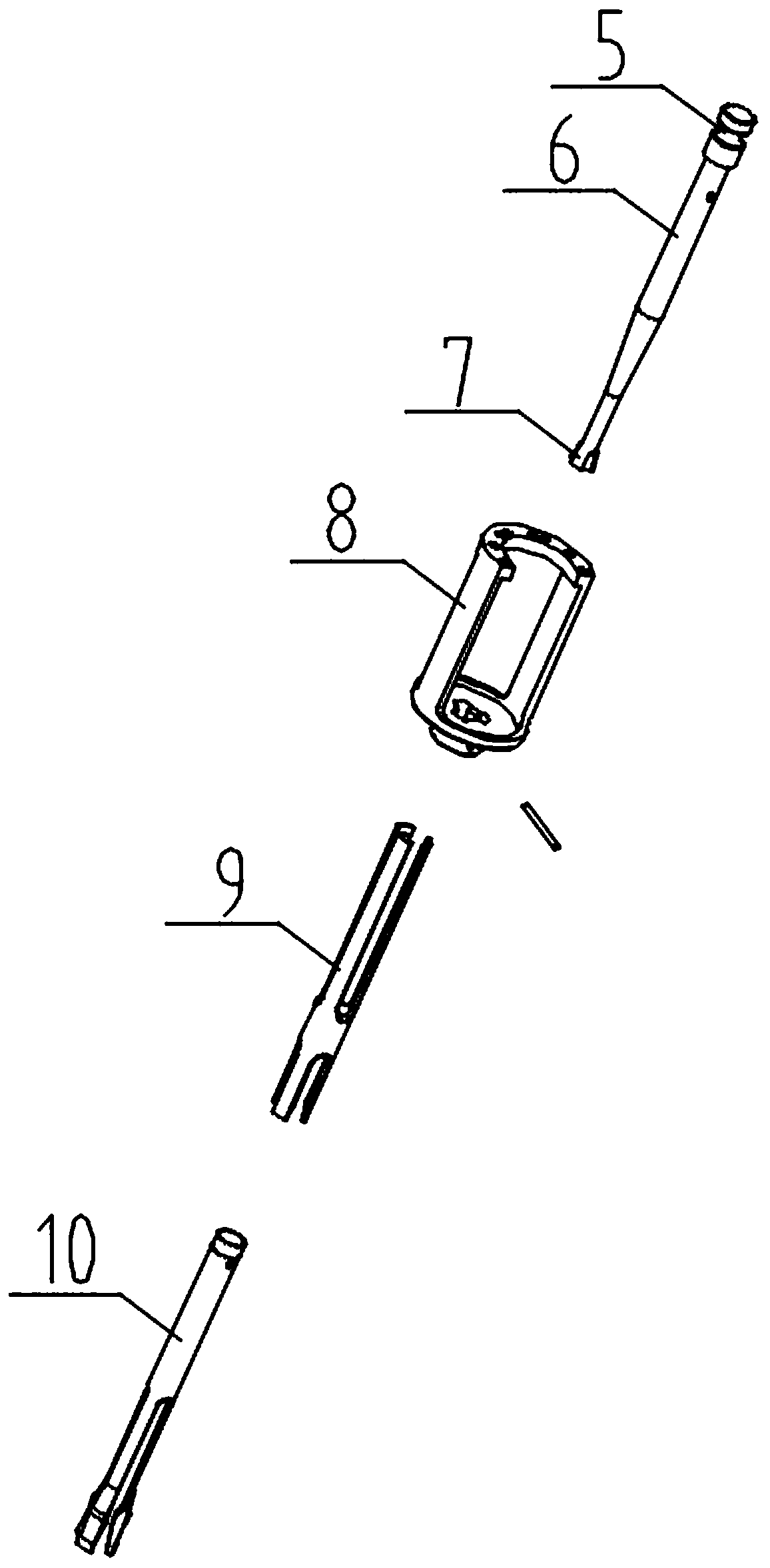
[0034] Such as figure 1 As shown, the present invention relates to an inner hole expansion and tightening grabbing mechanism, which i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com