An attitude fusion enhanced measurement method and system based on inertial navigation technology
A technology of inertial navigation and measurement method, which is applied in the field of inertial navigation, can solve the problems affecting the pitch angle and roll angle, it is difficult to ensure the speed and stability of the algorithm at the same time, and the MEMS magnetic sensor is susceptible to external interference, etc., to achieve good convergence Effect of speed and control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
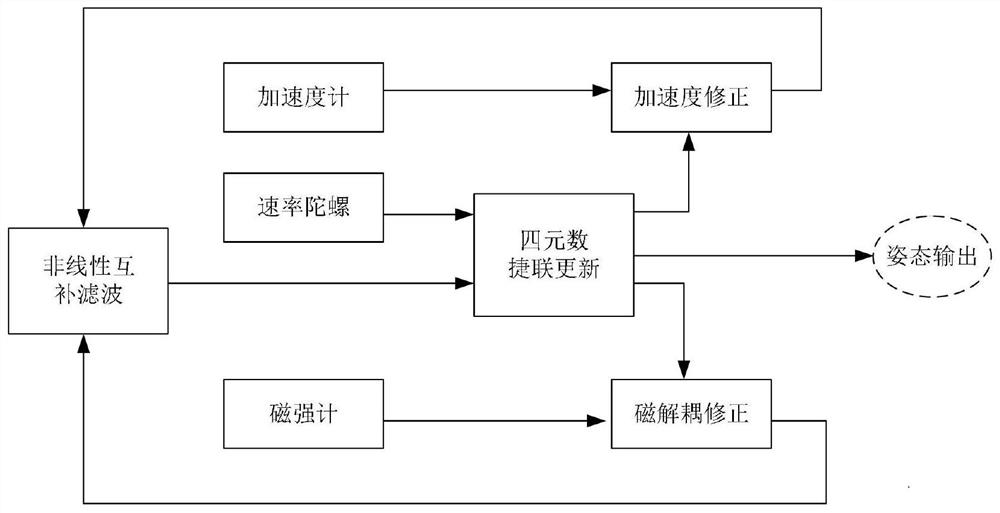
[0036] In one embodiment, such as figure 1 As shown, the nonlinear enhanced complementary filter attitude measurement method based on inertial navigation technology includes the following steps:
[0037] 1. Obtain the rate gyroscope data, perform quaternion initialization, and initialize the gyro bias δ=[δ x δ y δ z ] T =[0 0 0] T
[0038] The gyro deviation δ is the estimated value of the zero point offset. In the process of the method, according to the corrected acceleration data and magnetometer data, the feedback control method is used to correct the gyro deviation δ, which is the estimated value of the gyro zero point offset. The zero offset of the gyro is the main factor affecting the navigation accuracy.
[0039] 2. Attitude data strapdown calculation and quaternion strapdown u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com