Dynamic smooth path planning method based on D*_lite algorithm
A path planning and dynamic smoothing technology, which is applied to road network navigators and other directions, can solve problems such as inability to respond quickly in real time and affect the operating efficiency of planning algorithms, and achieve strong real-time and adaptable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
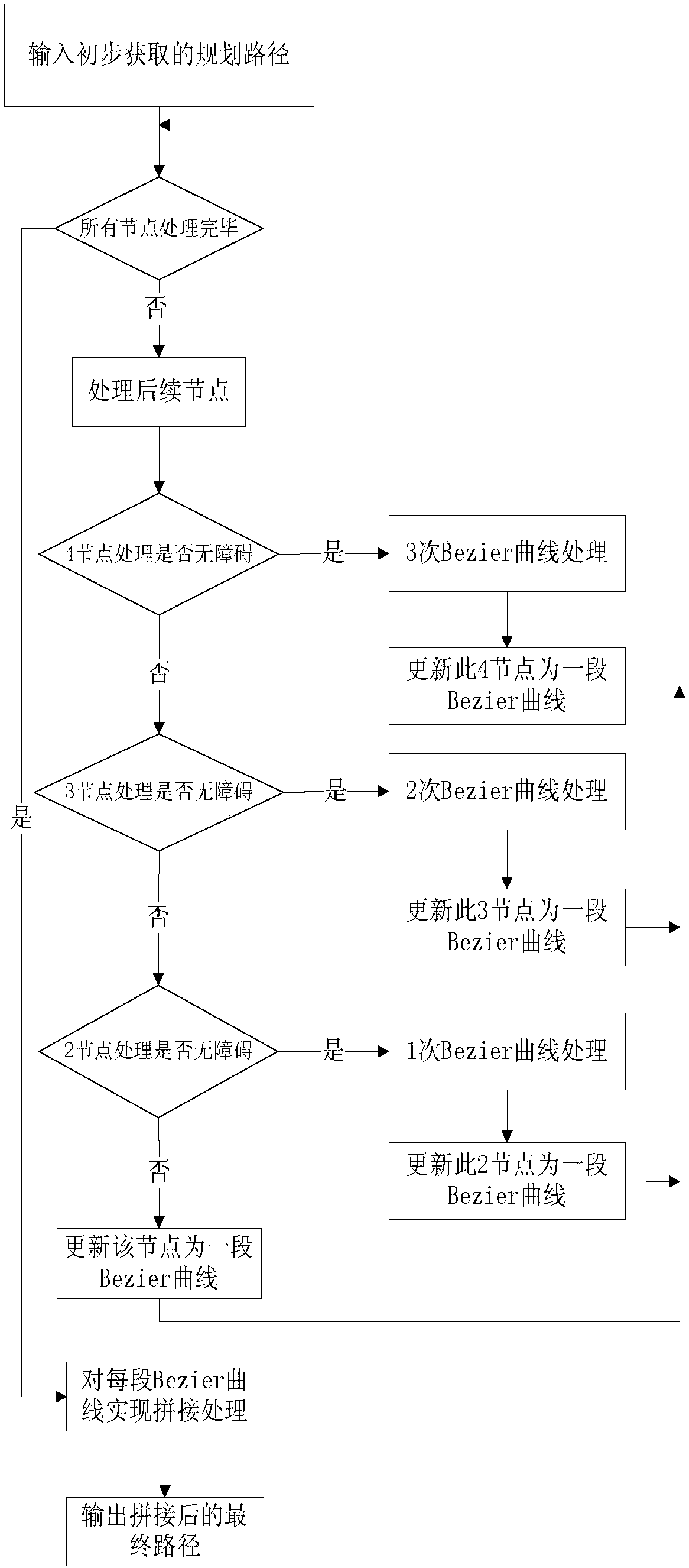
[0039] attached Figure 4 It is the overall flowchart of the method of the present invention, a dynamic smooth path planning method based on the D*_lite algorithm, including three main parts: grid map construction, application of the D*_lite algorithm to obtain the preliminary planning path, and Bezier curve smoothing and reprocessing. The implementation steps are as follows:
[0040] Step 1: Construct global and local grid maps with the help of multiple sensors such as lidar. The specific process is as follows:
[0041] A: Use various sensors such as lidar to obtain environmental information, including static obstacle information in the environment and the position information of the robot itself, to establish a static global grid map.
[0042] B...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com