Torque sensor and method for detecting torques occurring on or in a joint of an articulated arm robot
A torque sensor, robot technology, applied in the sensor field, can solve the problems of different signals, inaccurate measurement, robot shutdown, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
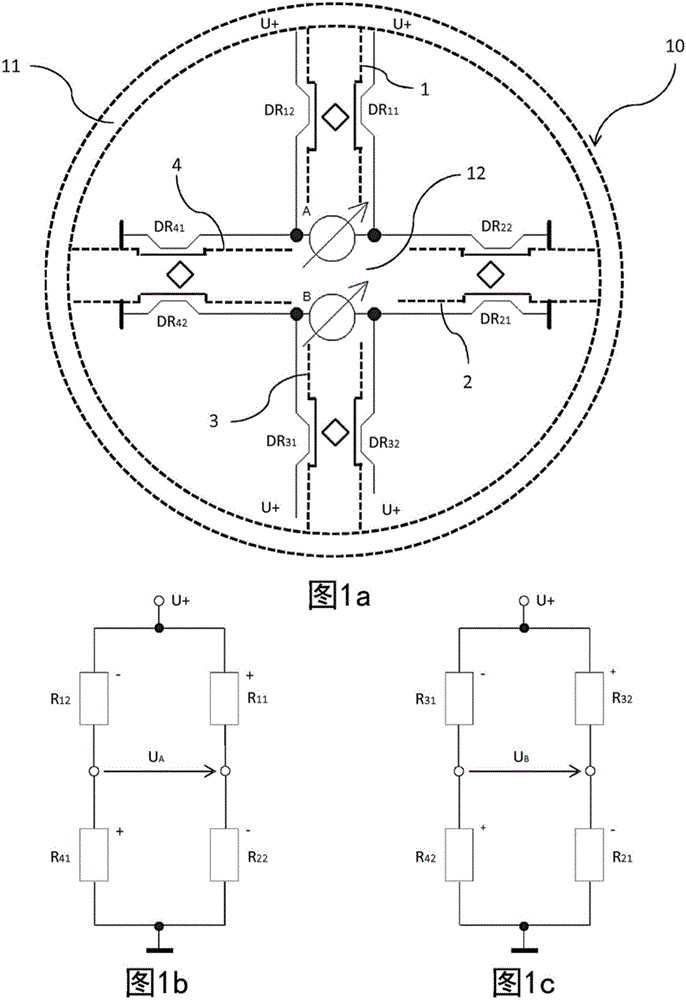
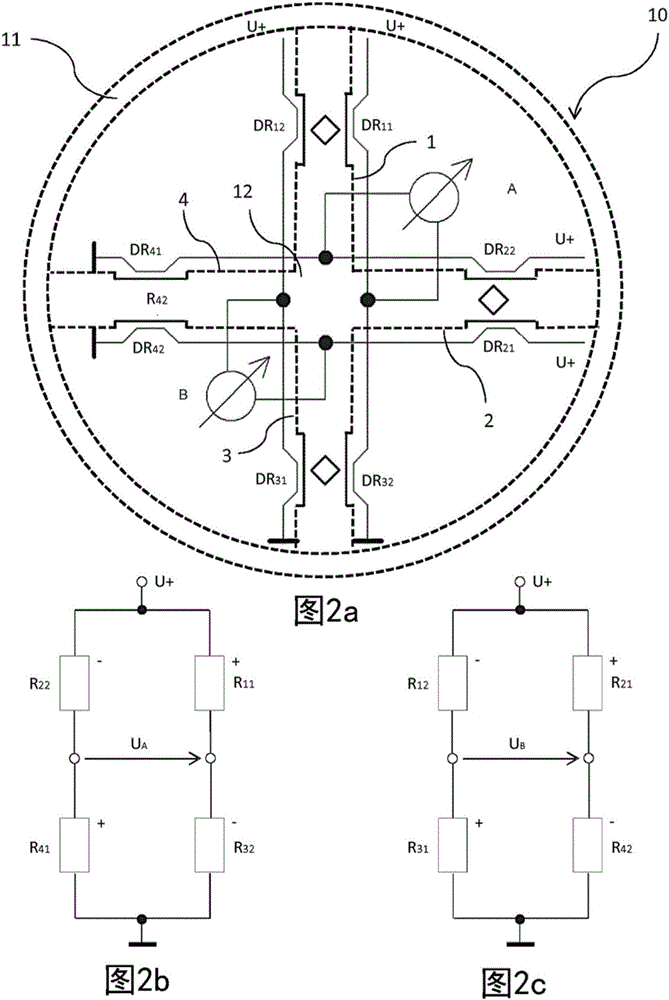
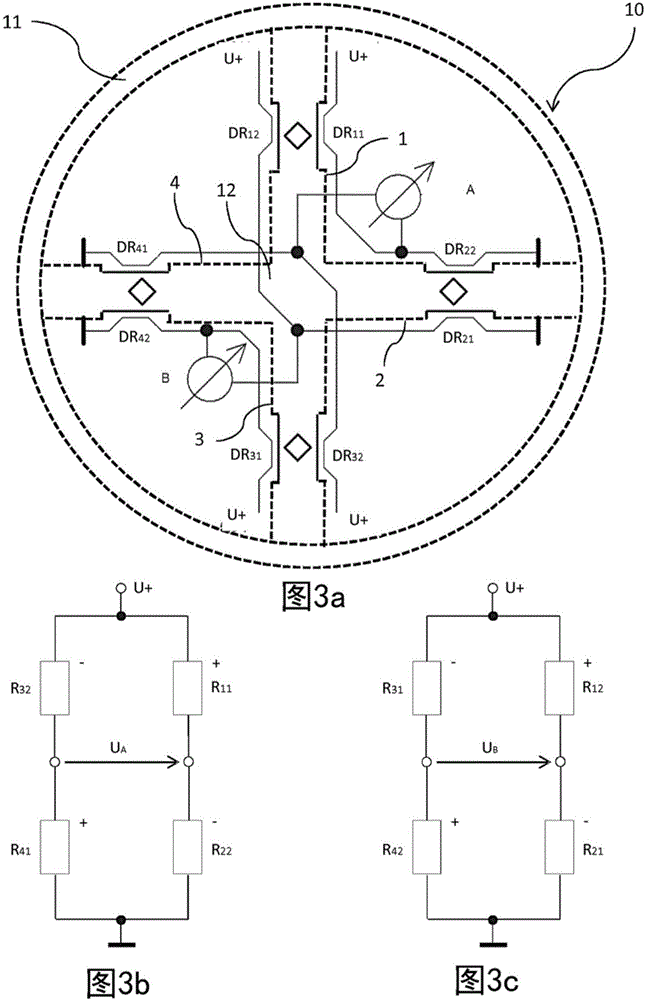
[0034] figure 1 a. figure 2 a. image 3 a respectively schematically shows the four spokes (measurement spokes) 1, 2, 3, 4 and the strain gauge DR arranged on them 11 、DR 12 、DR 21 、DR 22 、DR 31 、DR 32 、DR 41 、DR 42 , where the strain gauges are misconnected as two bridge circuits. The measuring spokes form part of a torque sensor 10 which, in the embodiment shown, comprises an outer ring 11 and an inner ring or hub (measuring hub) 12 , which are connected via the measuring spokes. The spatial configuration of torque sensor 10 is only shown purely schematically by dashed lines in the figure, since its correct configuration is not relevant for the invention. Furthermore, the basic structure of such a torque sensor is familiar to a person skilled in the art, as is described, for example, in the patent document DE 36 05 964 A1 mentioned at the outset, and will therefore not be described in detail here. Furthermore, measuring devices A, B for determining bridge voltage...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com