Hybrid crawling and swimming unmanned submersible and application method thereof
A submersible and hybrid technology, applied in the direction of underwater ships, special-purpose vessels, underwater operation equipment, etc., can solve problems such as harsh environments, unsatisfactory conditions, and strong ocean current disturbances, and achieve large-scale mobility and precise movement Positioning ability and strong environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
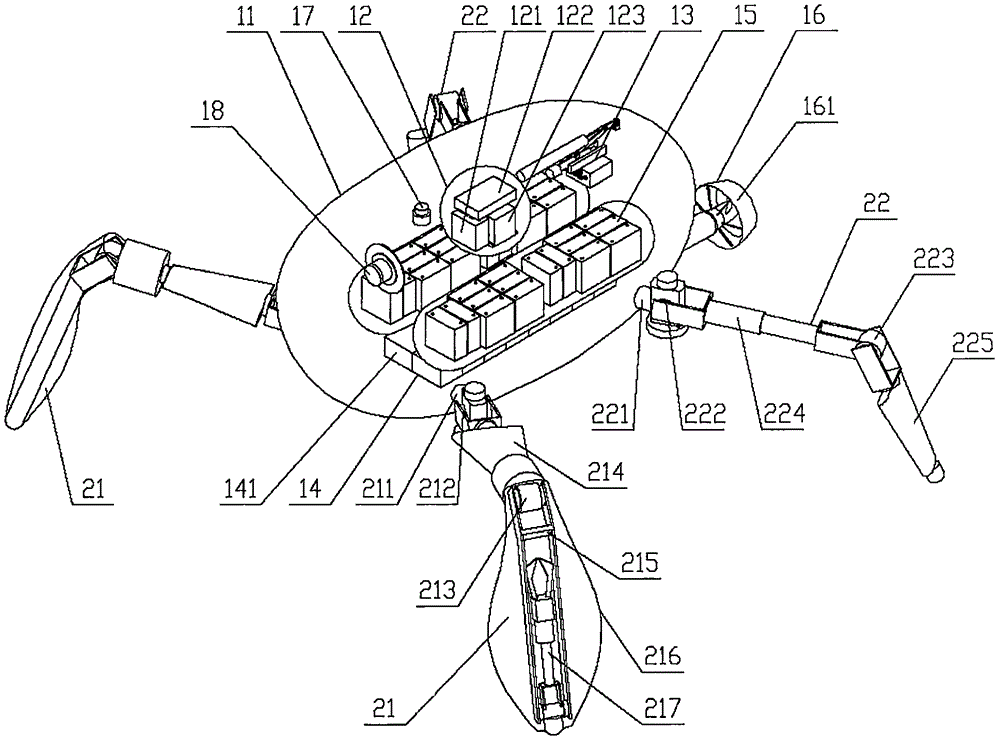
[0032] Embodiment 1, see attached figure 1 , a crawling-swimming hybrid unmanned submersible, which includes: an unmanned cruising device 1 and at least four multi-joint mechanical legs 2;
[0033] The unmanned cruising device 1 includes: a main water-permeable cabin 11, a pressure-resistant spherical cabin 12, a satellite communication module 13, a submersible-floating and dumping module 14, an energy module 15, a propulsion module 16, and a depth detection module 17; the main water-permeable cabin 11 is an AUV Integral structure, or ROV frame structure; pressure-resistant spherical cabin 12 includes: control module 121, underwater acoustic communication module 122 and navigation module 123, arranged in the main water-permeable cabin 11, located in the middle; satellite communication module 13 is arranged in the water-permeable cabin 11, located at the rear; the submersible-floating and dumping module 14 includes a plurality of submersible-floating and jetting sub-units 141, ...
Embodiment 2
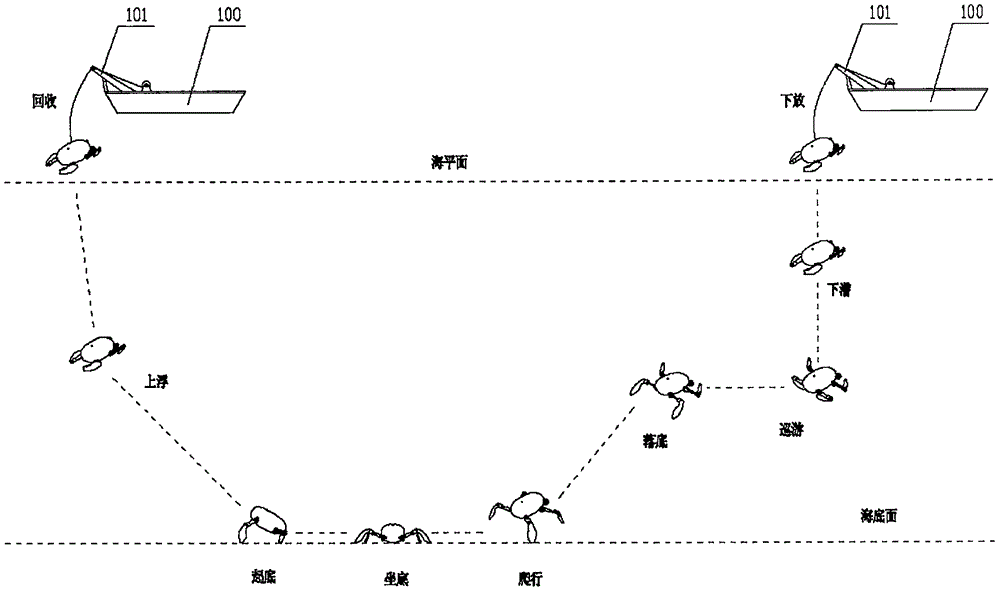
[0040] Embodiment 2: see attached Figure 2 to Figure 8 , a method for using a crawling-swimming hybrid unmanned submersible, which uses the crawling-swimming hybrid unmanned submersible as embodiment 1, and includes the following steps:
[0041] a) The crawling-swimming hybrid unmanned submersible is carried to the mission sea area by the working mother ship 100 and lowered by the crane 101 on the working mother ship 100 .
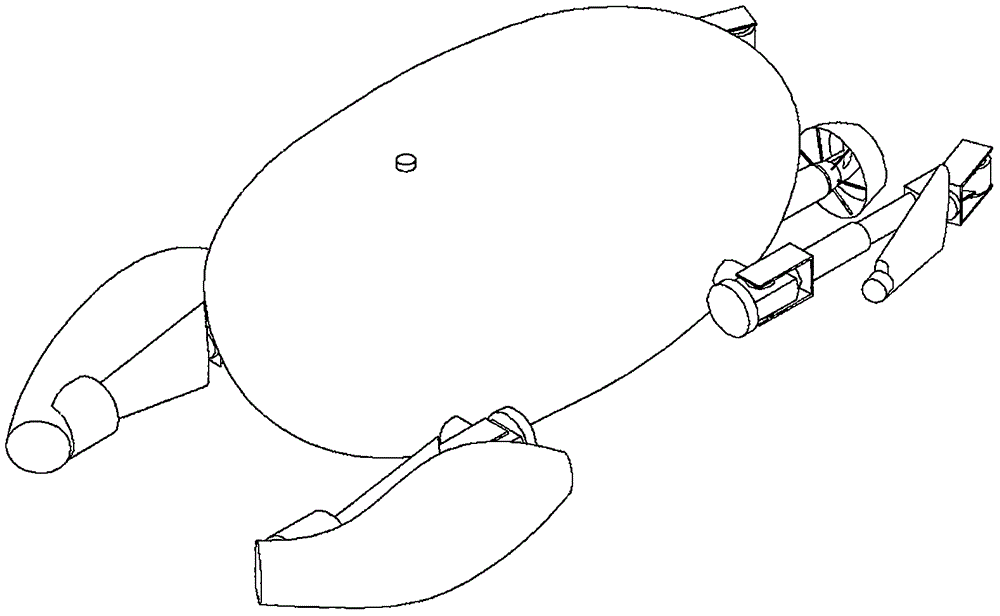
[0042] b) The crawl-swim hybrid unmanned submersible is in the dive / float attitude (see attached image 3 ), that is: the front multi-joint mechanical leg 21 and the rear multi-joint mechanical leg 22 are in a fully folded state. Negative buoyancy diving, when the depth detection module 17 detects a certain distance from the bottom of the sea, it triggers the crawling and swimming hybrid unmanned submersible to start working, the energy module 15, the underwater acoustic communication module 122 and the navigation module 123 are turned on, and the energy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com