Two-degree-of-freedom foldable mobile robot
A technology of mobile robots and degrees of freedom, applied in the field of mobile robots, can solve the problems of limited folding function of three-branch parallel mechanism, single-degree-of-freedom space, four-bar mechanism steering, etc., and achieve simple structure, low cost, convenient storage and transportation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in further detail below in conjunction with the accompanying drawings.
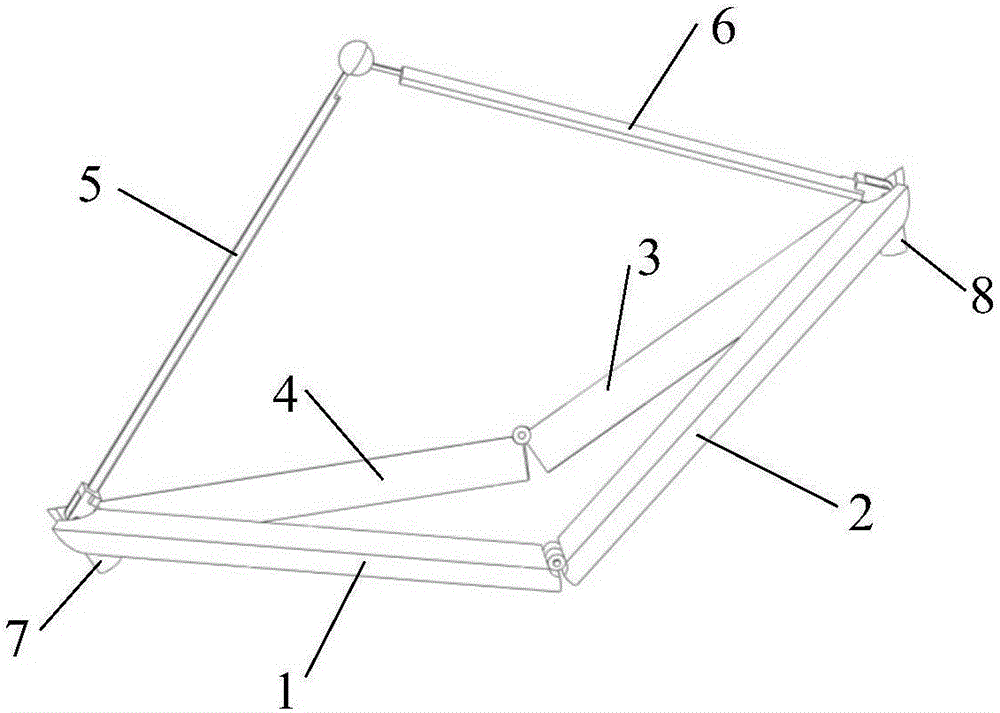
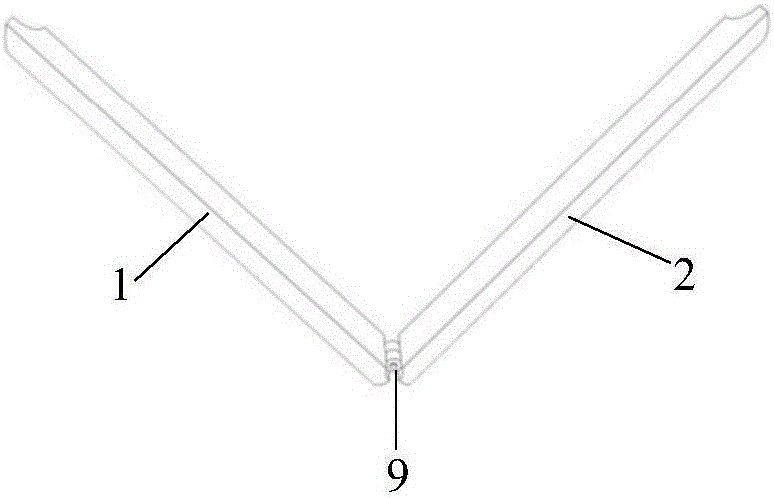
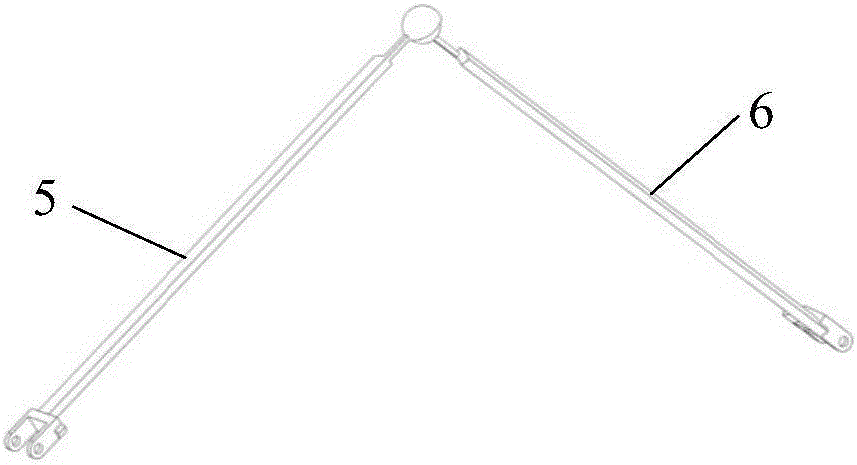
[0031] A two-degree-of-freedom foldable mobile robot, the robot as a whole figure 1 As shown, including the first member 1, such as Figure 4 Shown; the second member 2, such as Figure 5 Shown; the third member 3, such as Image 6 Shown; the fourth member 4, such as Figure 7 Shown; the fifth rod 5, the sixth rod 6, such as image 3 Shown; the first motor 7; as Figure 4 As shown, the second motor 8; as figure 2 As shown, the end of the first rod 1B and the end of the second rod 2C, the end of the third rod 3F and the end of the fourth rod 4G respectively realize the mutual rotation connection of the two rods through the connecting shaft 9; image 3 As shown, the spherical end of the fifth rod 5 and the spherical end of the sixth rod 6 are connected by a ball pair to realize the mutual rotation between the two rods; Figure 11 As shown, the end of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com