A method for automatically planning a path for a mobile robot and the mobile robot
A mobile robot and automatic planning technology, applied in the field of mobile robots, can solve problems such as algorithm search defects, premature convergence, and low memory overhead, and achieve the effects of overcoming the lack of convergence performance, enhancing convergence performance, and accurately planning paths
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
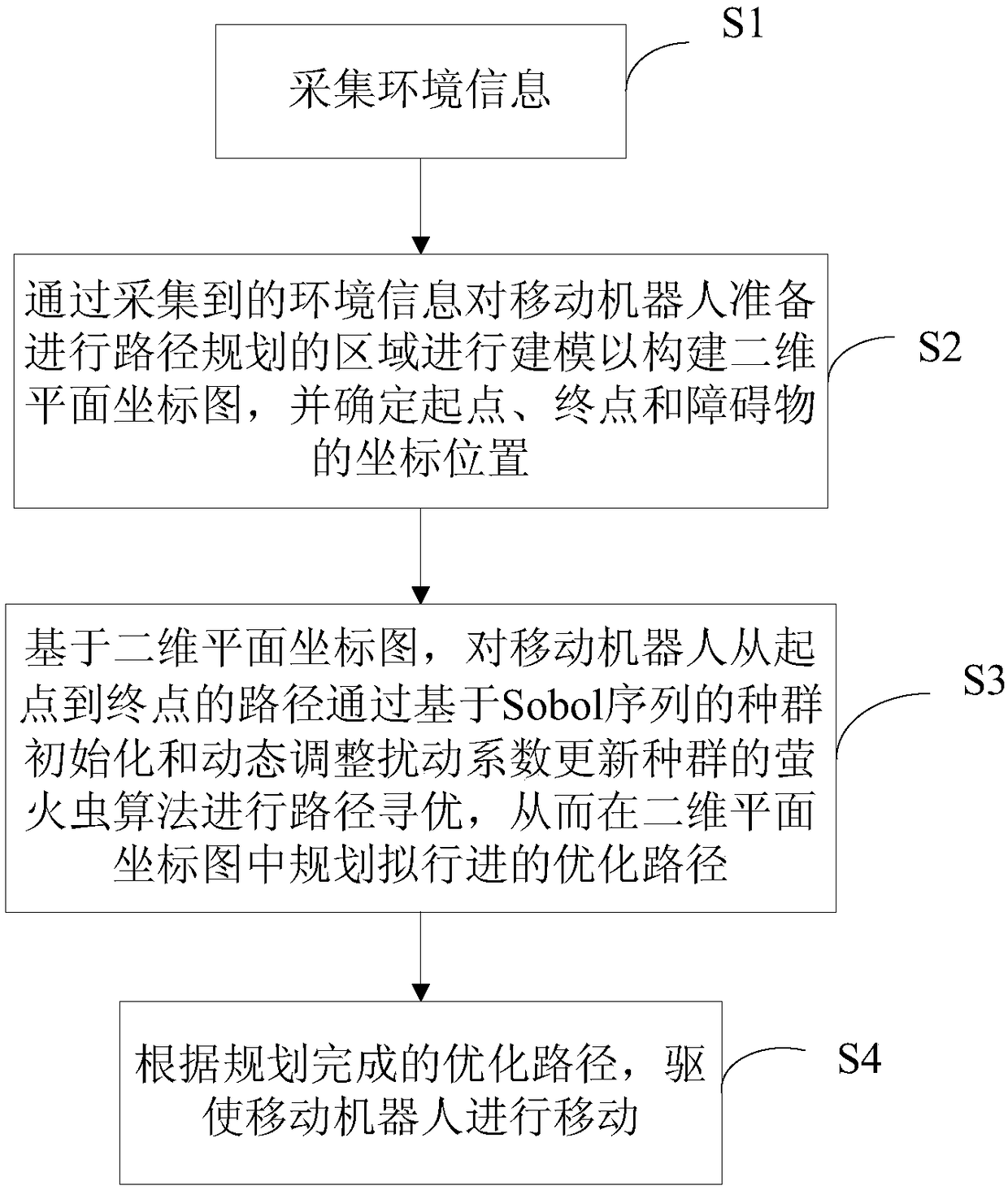
[0053] Embodiment 1 of the present invention provides a method for automatically planning a path of a mobile robot, and this embodiment will be described in detail below with reference to the accompanying drawings. figure 1 It is a flow chart of the method of Embodiment 1 of the present invention, please refer to figure 1 , the method of the embodiment of the present invention includes the following steps:
[0054] Step S1, collecting environmental information;
[0055] Among them, the mobile robot can scan and obtain external environmental information through infrared sensors or other acquisition devices.
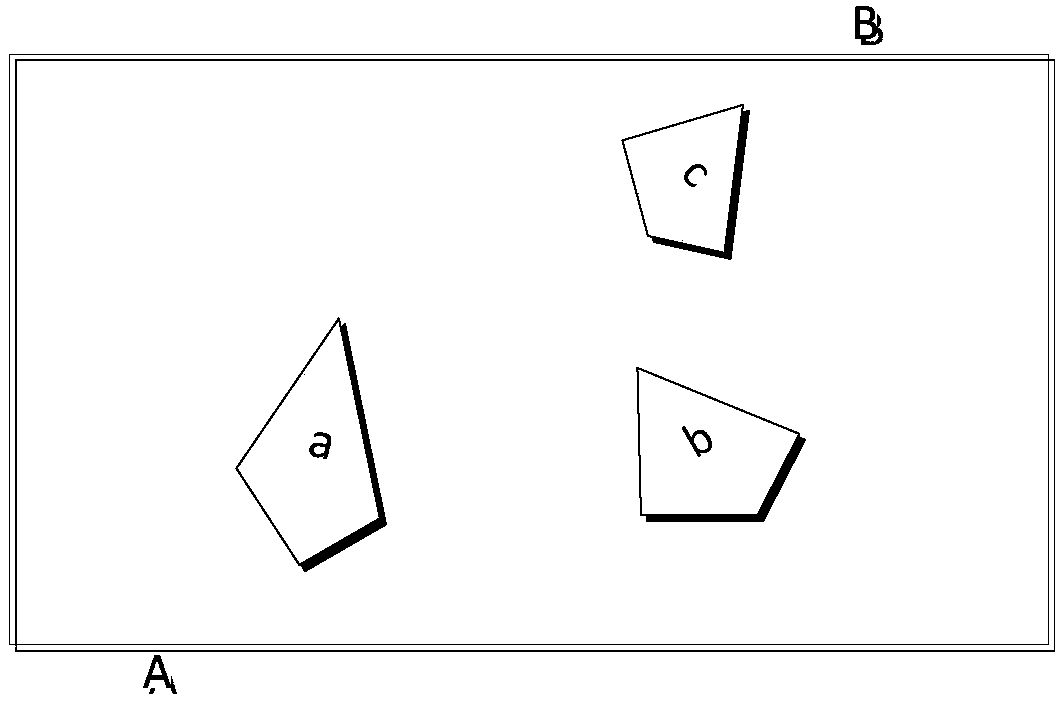
[0056] Step S2, using the collected environmental information to model the area where the mobile robot is going to perform path planning to construct a two-dimensional plane coordinate map, and determine the coordinate positions of the starting point, the end point, and obstacles;
[0057] Path planning refers to finding a motion path from the starting point to the end p...
Embodiment 2
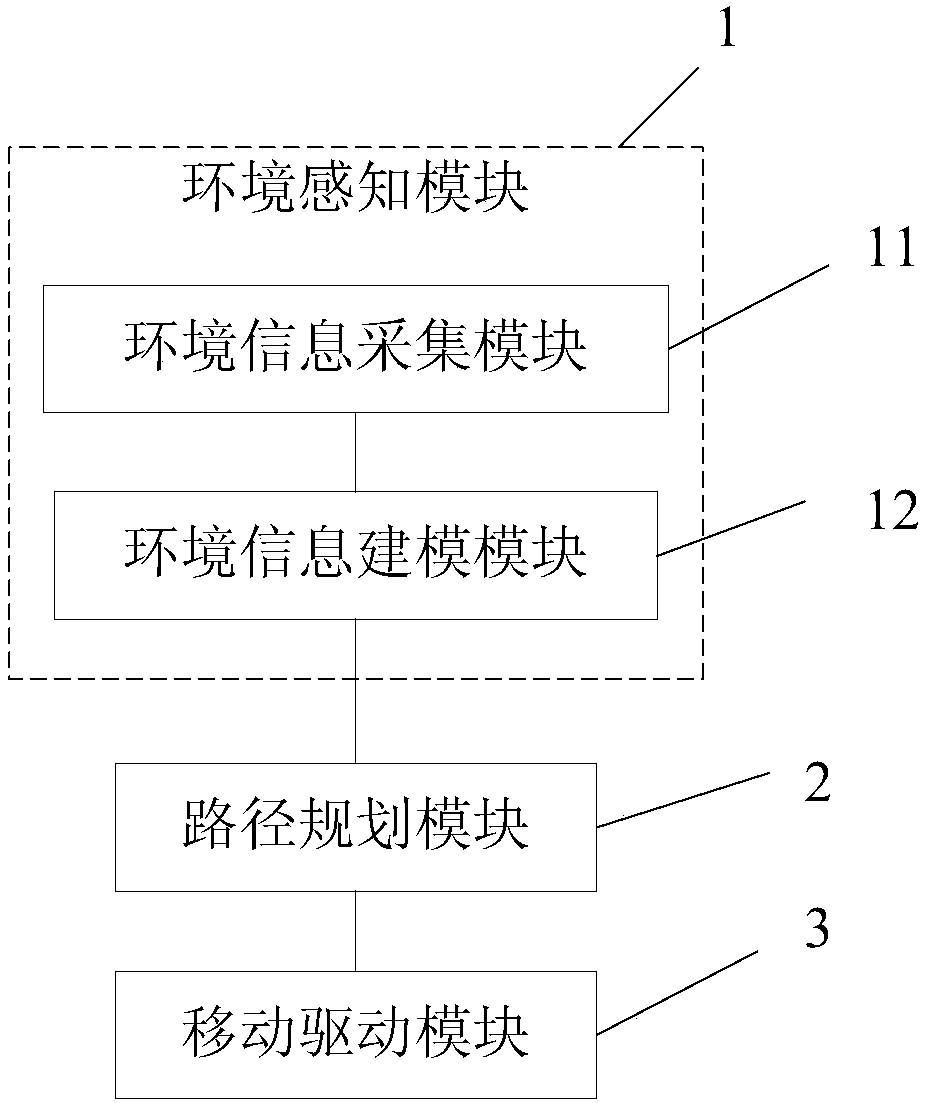
[0088] Embodiment 2 of the present invention provides a mobile robot for automatically planning paths, please refer to image 3, the mobile robot of the embodiment of the present invention includes an environment perception module 1, a path planning module 2 and a mobile driving module 3, wherein the environment perception module 1 is provided with an environment information collection module 11 and an environment information modeling module 12, and the above modules will be described below functions are described in detail.
[0089] The environmental information collection module 11 is used to collect environmental information.
[0090] Wherein, the environmental information collection module 11 can be set as an infrared sensor or other collection device, and the mobile robot can scan and obtain external environmental information through the infrared sensor or other collection device.
[0091] The environmental information modeling module 12 is used to model the area where t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com