Mechanical gripper
A technology of mechanical claws and steering gears, applied in the field of mechanical claws, can solve the problems of restricting the shape of grasping objects, insufficient flexibility and balance of mechanical grasping, and insufficient stability, etc., to achieve small and portable structure, good dynamic balance, and stable shaking small effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
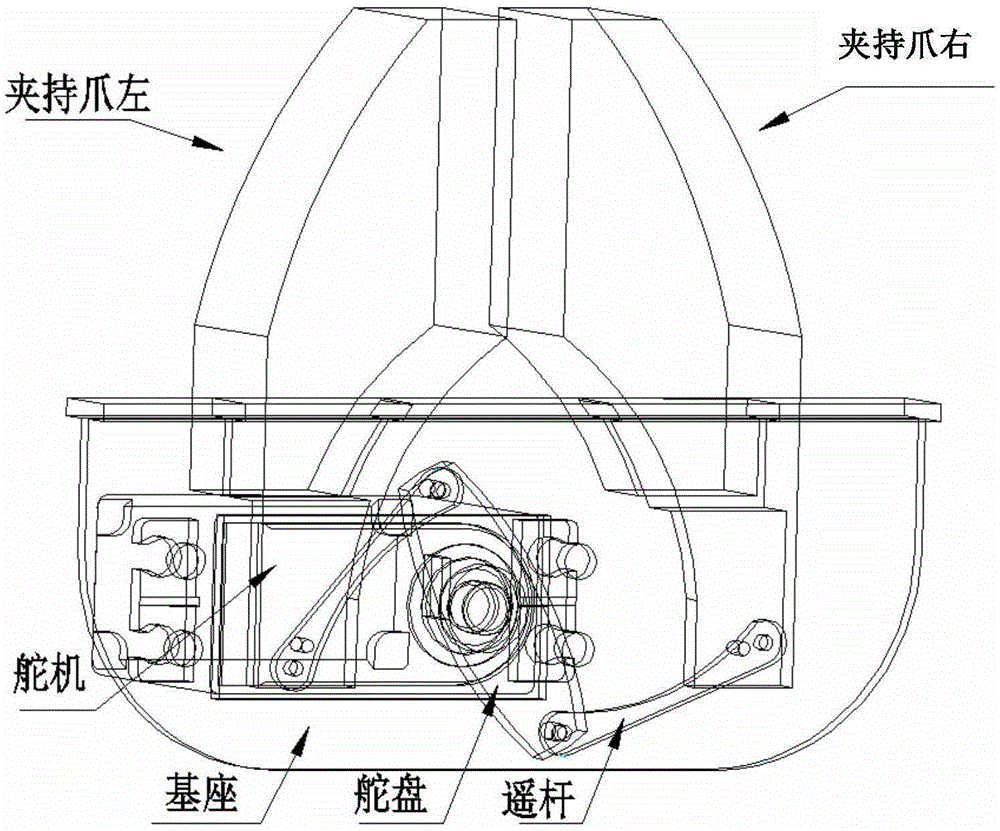
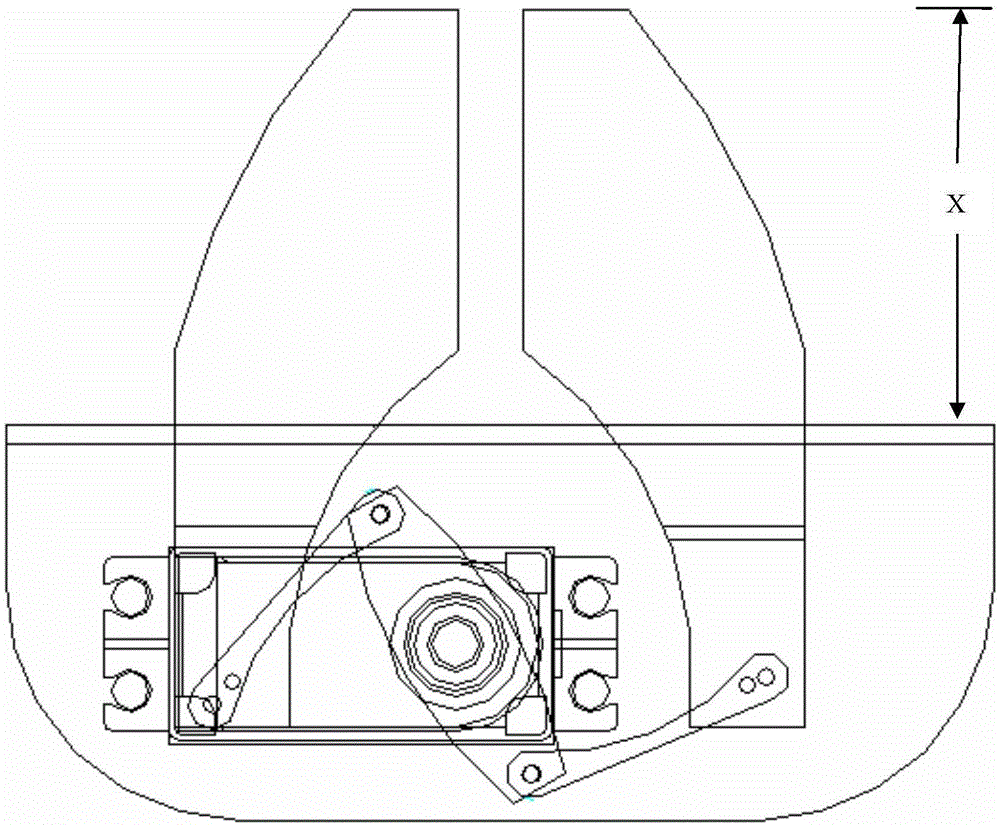
[0007] see Figure 1-2 , the mechanical claw of the present invention includes a base, a steering gear, a steering wheel, a remote lever and two clamping claws. There is a slideway above the base, and two clamping claws are installed on the slideway, which can slide along the slideway. The part of the clamping claws outside the base is the clamping part. When the clamping claws slide toward each other, The object can be clamped by the clamping part. The part of the clamping claw located in the base is a connecting part.
[0008] The steering gear is installed in the base, and the steering wheel is installed on the steering gear. The steering gear is an electric motor and can receive external control signals. When receiving the external control signals, the steering gear drives the steering wheel to rotate.
[0009] The two ends of the steering wheel are respectively hinged with a remote rod, one end of the remote rod is hinged with the steering wheel, and the other end is hi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com