Dual vision self-positioning system for fully automatic lawn mowing robot
A lawn mowing robot, fully automatic technology, applied in the direction of electrical program control, digital control, etc., can solve the inability to provide position information for fully automatic lawn mowing robots, the accuracy of path planning for fully automatic lawn mowing robots, and the efficiency constraints of return charging, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with accompanying drawing:
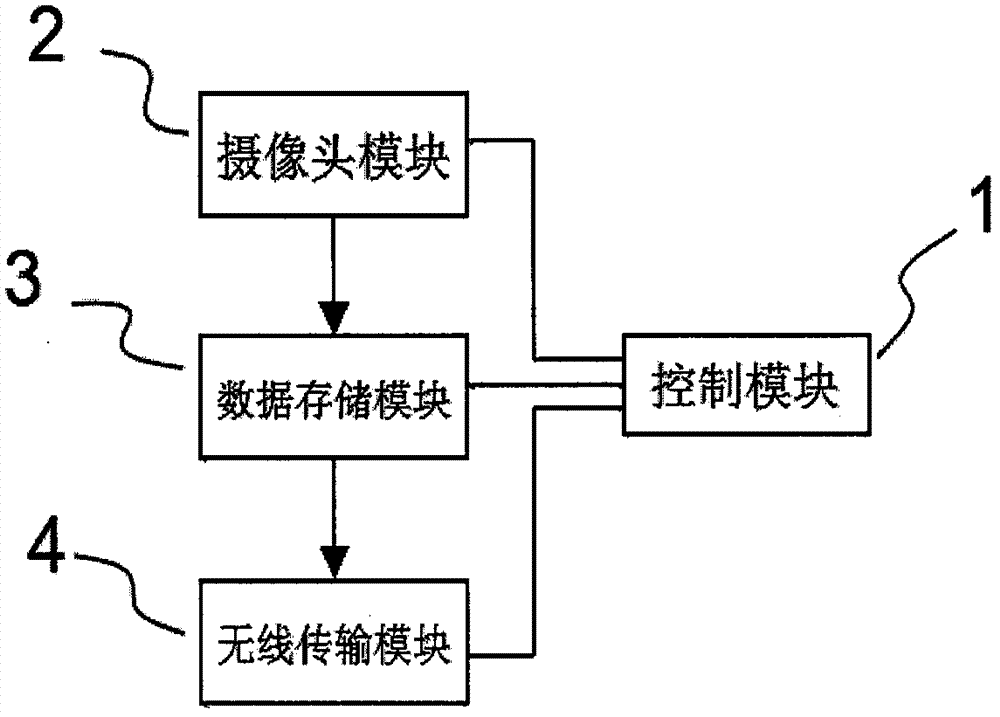
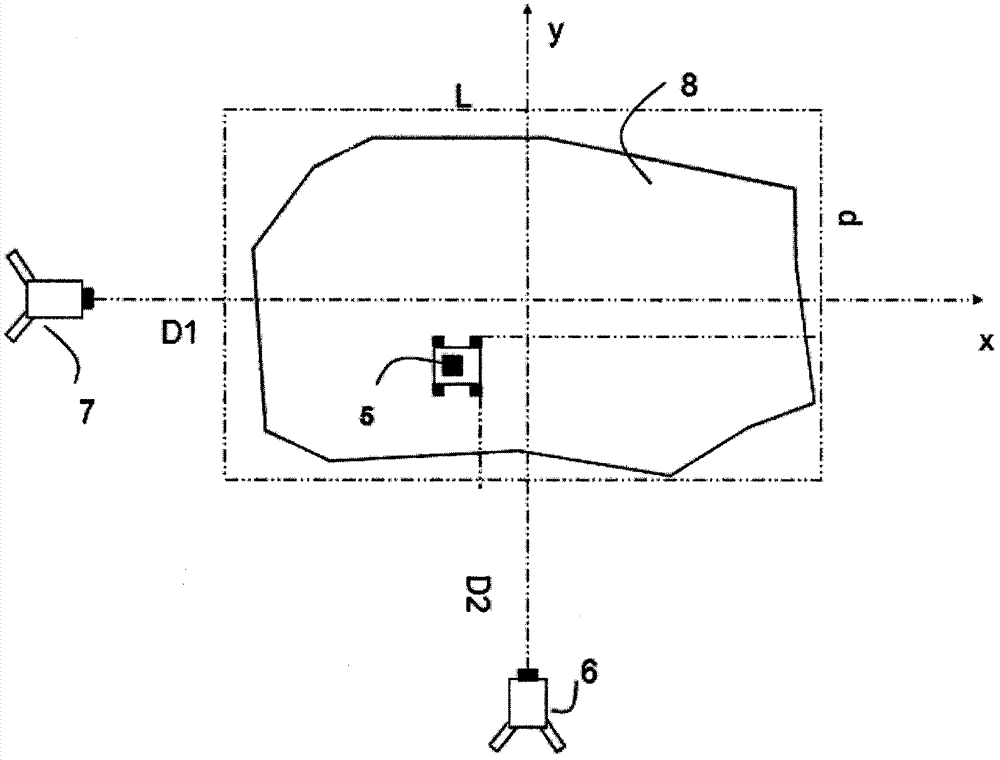
[0015] Such as Figure 1-3 Shown, the dual-vision self-positioning system of fully automatic lawnmowing robot comprises the first visual collection module 7 and the second visual collection module 6 that carry out real-time image collection, described first visual collection module 7 and the second visual collection module 6 consists of a data storage module 3, a wireless transmission module 4, a camera module 2, and a control module 1; the control module 1 and the data storage module 3, the camera module 2, and the wireless transmission module 4 connected, the control module 1 coordinates the wireless transmission module 4, the camera module 2 and the data storage module 3 to work synchronously, realizing the first visual acquisition module 7 and the first The second vision acquisition module 6 acquires the image of the working grass and recognizes the function of the ful...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com