A method for indoor autonomous navigation of micro UAV
A technology for autonomous navigation and unmanned aerial vehicles, which is used in navigation, mapping and navigation, and navigation through speed/acceleration measurement. Indoor autonomous flight and other problems, to achieve the effect of improving autonomous environment perception ability, avoiding modeling real-time, and improving overall modeling accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
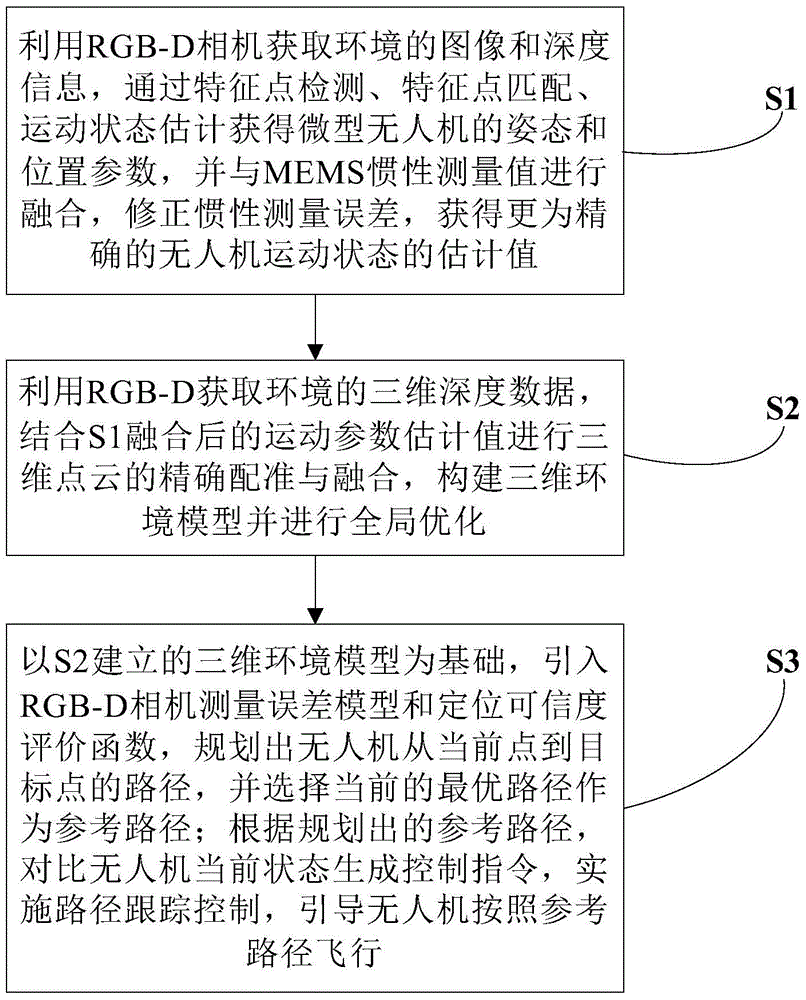
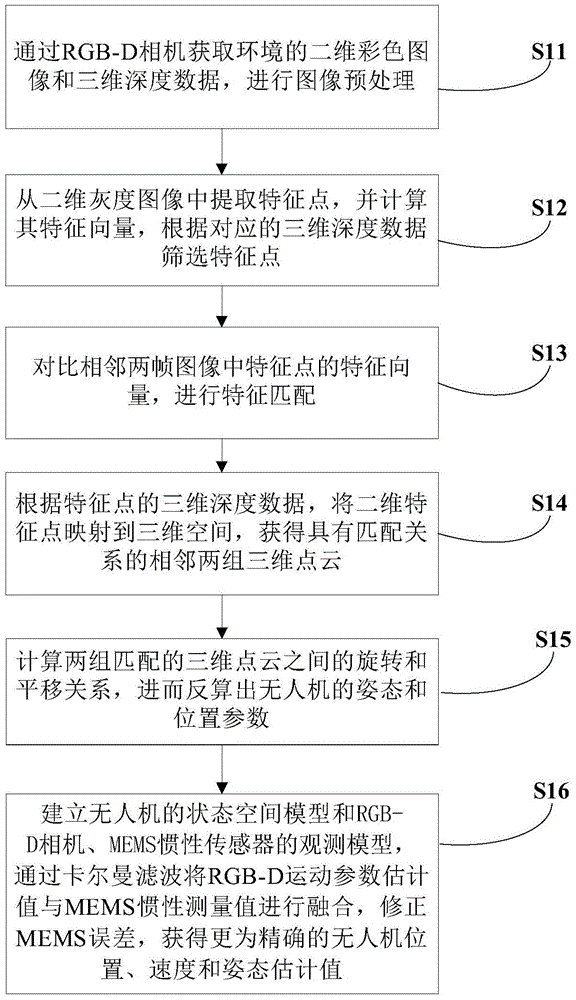
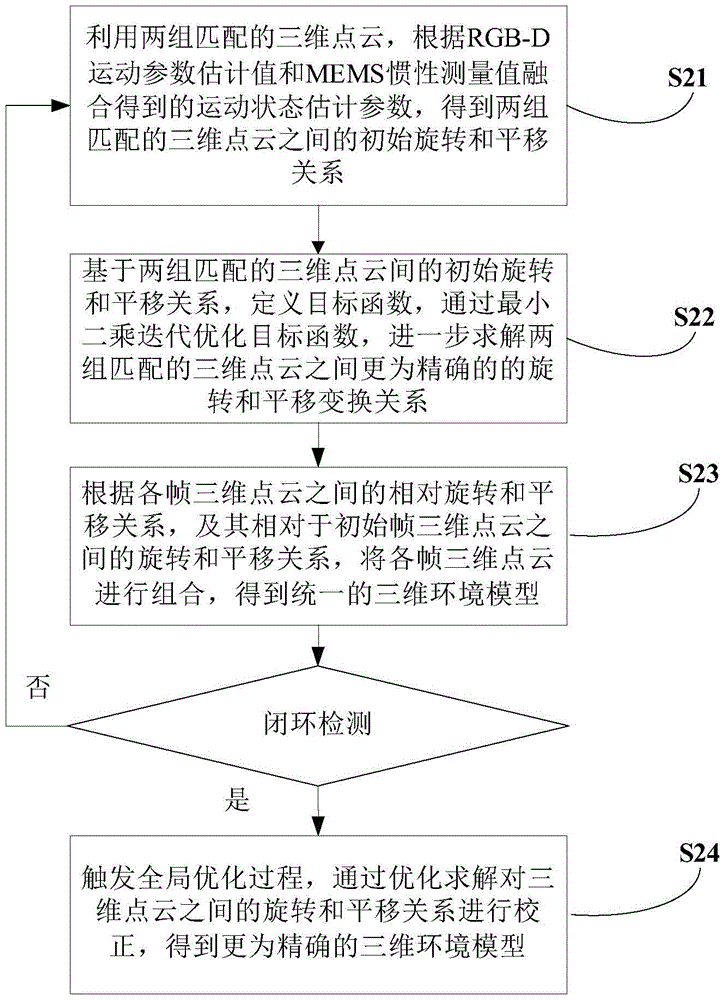
[0058] S1 Motion state estimation of micro UAV based on RGB-D and MEMS sensors, such as figure 2 As shown, it specifically includes the following steps:
[0059] S11: Obtain the image and depth data of the environment through the RGB-D camera, including a series of two-dimensional color domain (RGB) pixels composed of two-dimensional color images and corresponding three-dimensional depth domain data.
[0060] For a point p in a three-dimensional environment i , the form of information obtained by the RGB-D camera is as follows: p i =(x i ,y i ,z i ,r i , g i ,b i ), where x i ,y i ,z i is the 3D depth data of the point, representing the 3D position of the point relative to the center of the RGB-D camera, r i , g i ,b i It is the color gamut (RGB) information corresponding to this point. Therefore, at a certain moment, all the environmental points in the field of view of the RGB-D camera are described as p i The information in the form constitutes a frame of two...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com