


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Novel remote operation far-end robot control platform and method
A technology for controlling platforms and robots, applied in manipulators, manufacturing tools, etc., can solve the problems of large transmission delay, large amount of video information, and difficulty in delay compensation, and achieves improved work efficiency, small feedback transmission delay, and safety. The effect of reliable work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
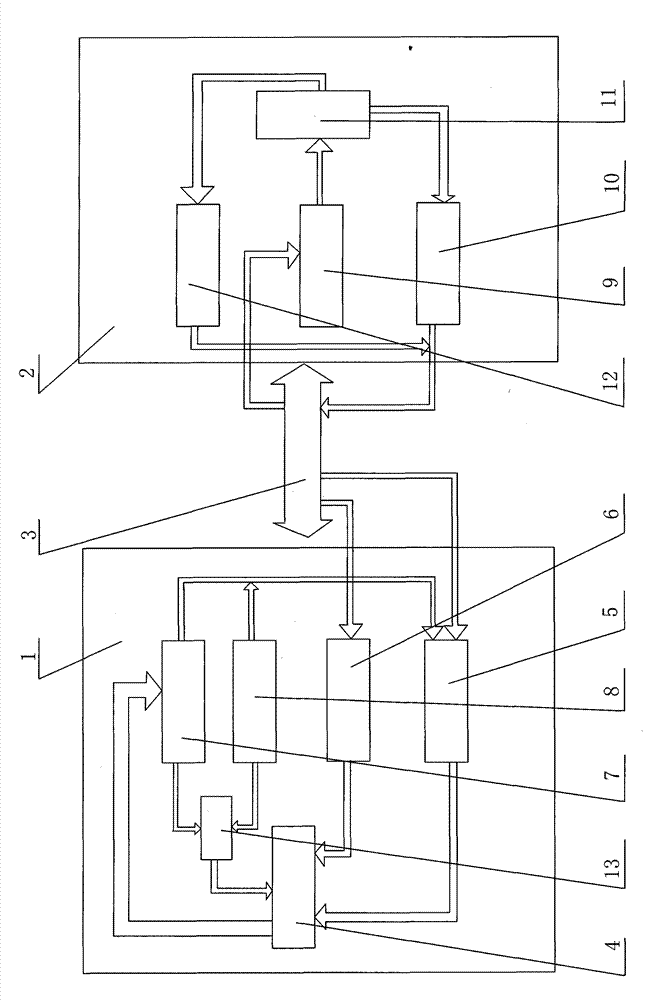
[0025] A new type of teleoperation remote robot control platform, which consists of: a client terminal 1 and a server 2, the client terminal 1 transmits 3 data to the server 2 through the network, and the client terminal 1 includes a human-computer interaction device 4 , the human-computer interaction device 4 is simultaneously connected with the virtual operation model 7 and the virtual feedback model 8 of the video display 5, the data comparison 6 and the overlay 13; the server 2 includes a remote robot control unit 9, and the The remote robot control unit 9 is connected to a remote robot 10 , and the remote robot 10 is connected to a data collection unit 11 and a video monitoring device 12 .
[0026] In the novel teleoperation remote robot control platform, the virtual operation model and the virtual feedback model are connected to video display, and the virtual feedback model is connected to data comparison.
Embodiment 2
[0028] In the operation method of the novel teleoperation remote robot control platform described in Embodiment 1, in the operation flow described, two virtual models are superimposed and displayed in the same display window—a virtual operation model and a virtual virtual feedback model;
[0029] The virtual virtual feedback model is synchronized with the motion of the real remote robot. The operator simulates the motion of the remote robot through the virtual operation model and sends the motion information to the remote robot, while the motion of the virtual virtual feedback model It is controlled by the motion feedback information of the remote robot;
[0030] The feedback information is real-time joint motion sensor information, the data is small, the time delay is small, and the motion accumulation error caused by the time delay can be compensated by model angle compensation, so that the motion of the virtual virtual feedback model is consistent with the motion status of t...
Embodiment 3
[0037] The operation method of the novel remote operation remote robot control platform described in embodiment 1 or 2, the described operation process,
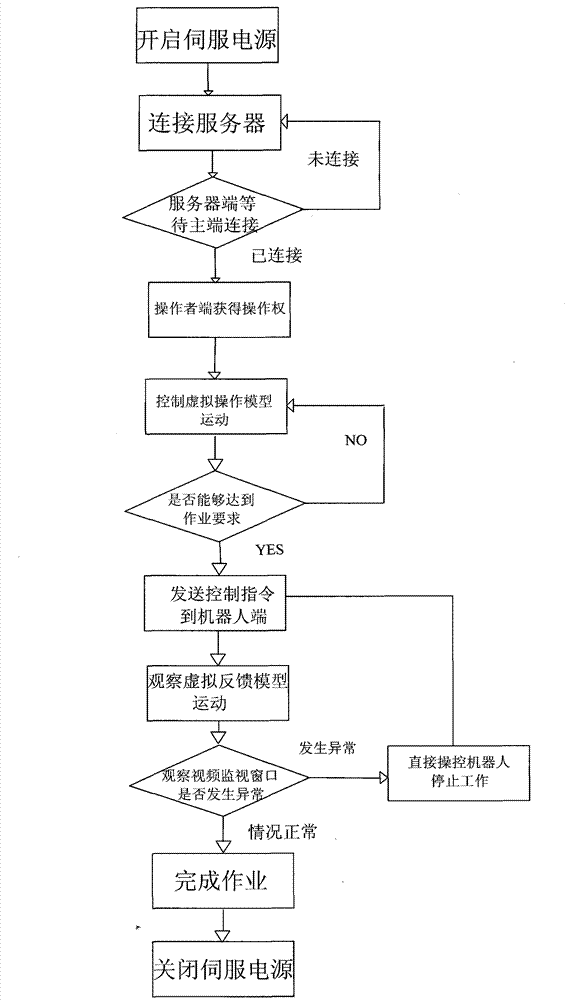
[0038] (1) Turn on the system servo power supply, plan the operation trajectory of the remote robot, control the virtual operation model on the client side, and observe whether its operation trajectory meets the operation requirements, including whether the obstacle avoidance is smooth, and whether the final pose positioning is accurate. If you want to observe the movement status of the virtual operation model in detail, select the drawing track to draw the detailed trajectory, and you can get a clear track of the virtual operation model in the display window.
[0039] (2) If the virtual operation model satisfies the corresponding operation requirements, the client sends the operation command to the remote real remote robot, and the real remote robot moves and sends back data to the virtual virtual feedback model in real time...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com