
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A control system and working method of an intelligent floor washing robot
A working method and robot technology, applied in machine parts, manual sweeping machinery, carpet cleaning, etc., can solve the problems of a lot of manpower, material resources and time, heavy workload, damage, etc., and achieve the effect of solving the problem of garbage disposal.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0053] An intelligent floor cleaning robot control system described in this embodiment includes: a robot control mechanism, a cleaning control mechanism, a cleaning control mechanism, a garbage sorting and recycling control mechanism, an obstacle avoidance control mechanism, a garbage detection control mechanism and a control mechanism. device, the robot control mechanism is provided with a walking control module, a wireless transmission control module, a battery reminder control module and a robot controller, the walking control module is connected to the walking driving mechanism, and the wireless transmission control module is connected to the wireless receiver , the power warning control module is connected to the power monitoring mechanism of the storage battery; the walking control module, wireless transmission control module, and power warning control module are all connected to the robot controller, and the garbage detection control mechanism is connected to the detectio...
Embodiment 2
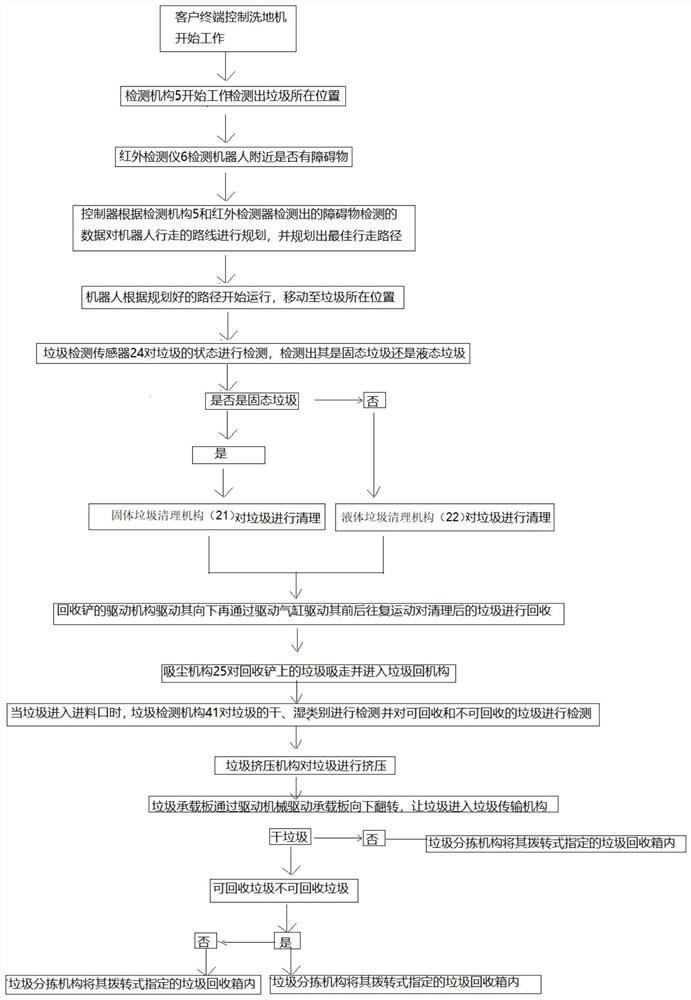
[0060] Such as figure 2 , 3 A working method of an intelligent floor washing robot shown, the specific working method is as follows:
[0061] 1: First, the detection mechanism 5 used to detect the location of the garbage detects the location of the garbage, and transmits the detected information to the controller. The controller analyzes the location of the garbage according to the received information, and transmits the information to the robot controller;
[0062] 2: At the same time, the infrared detector 6 detects whether there are obstacles near the robot, and transmits the detected data to the controller. The best path is planned based on the location;
[0063]3: After the path planning in the previous step is completed, the robot controller will start to work through the command line of the drive control module, and the walking control module will start to work, and the driving mechanism will start to drive the walking wheels to start walking through the command lin...
Embodiment 3
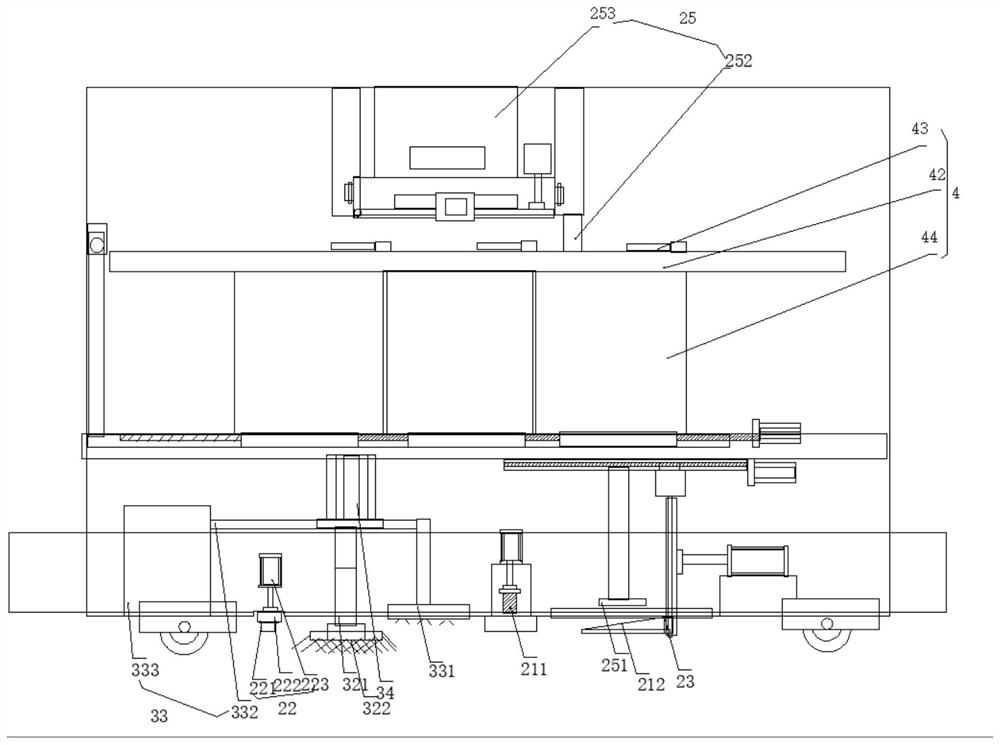
[0072] Such as Figure 3 to Figure 8 An intelligent floor washing robot is shown, a robot housing 1, a cleaning device 2, a cleaning device 3, a garbage recovery device 4, a set of detection mechanisms 5 for detecting the position of garbage, and a set of detection mechanisms for detecting obstacles around the robot Infrared detector 6, wherein, the robot housing 1 is provided with a housing 11 and a base 12, the housing 11 is arranged on the base 12, and the cleaning device 2 and the cleaning device 3 are both arranged on the robot Below the housing 1, the garbage recovery device 4 is located inside the robot housing 1, the detection mechanism 5 and the infrared detector 6 are located around the base 12, and the cleaning device 2, cleaning device 3, The garbage collection device 4, the detection mechanism 5 and the infrared detector 6 are all connected to the robot control device, and the robot control device is connected to the client terminal through the network.
[0073] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com