A biomimetic snake-like robot
A bionic snake and robot technology, applied in the field of robotics, can solve the problems of not being able to be better applied, not being able to crawl on soft ground, and not having the ability to overcome obstacles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
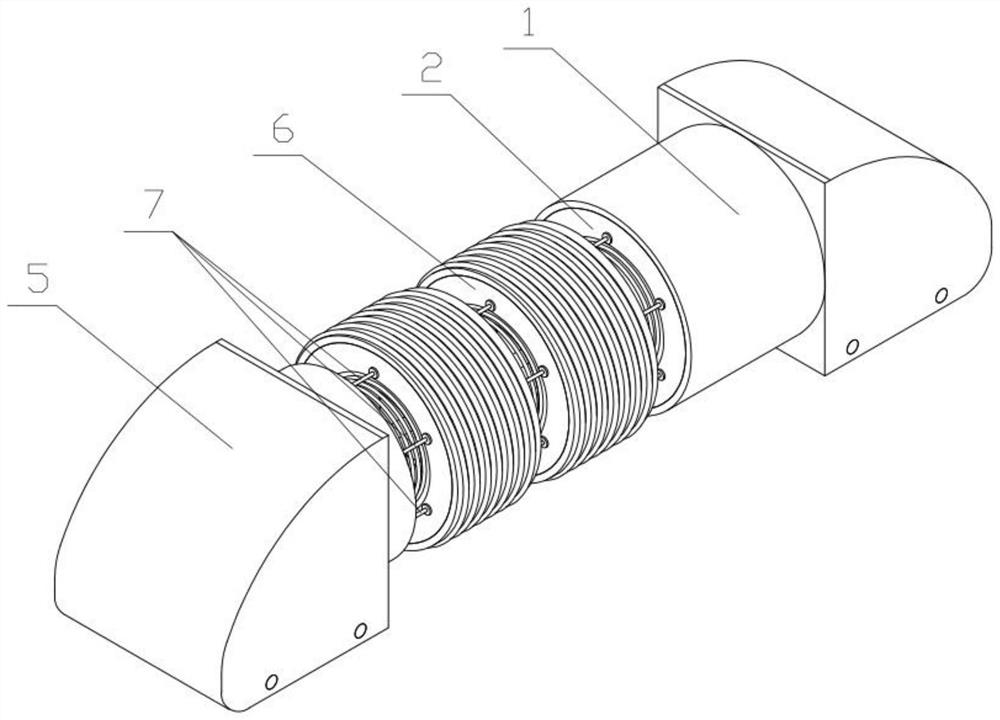
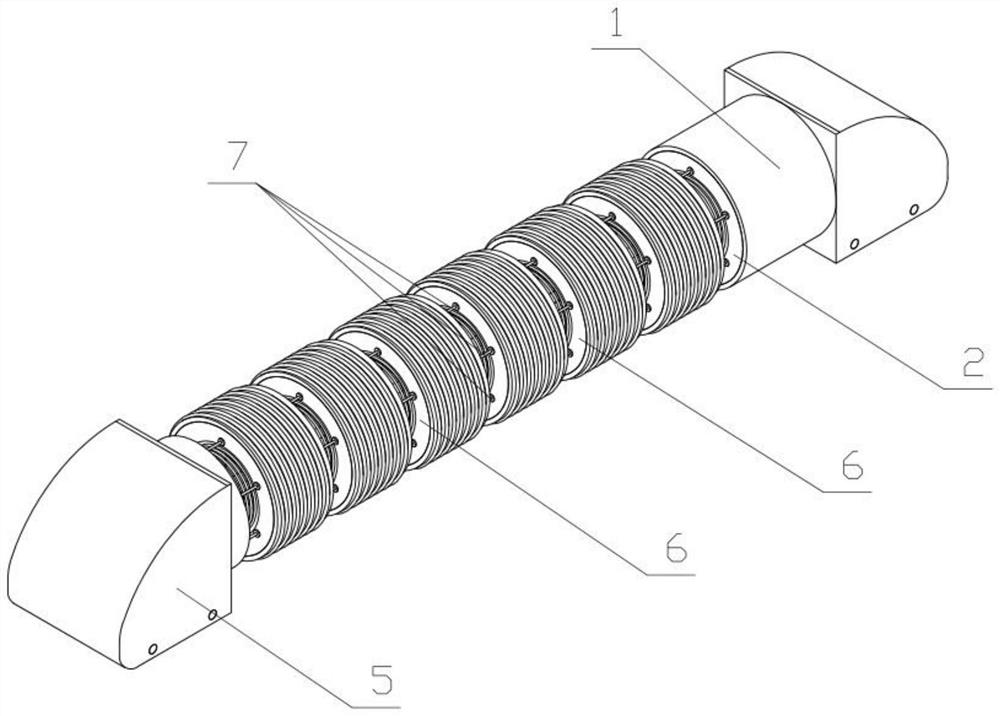
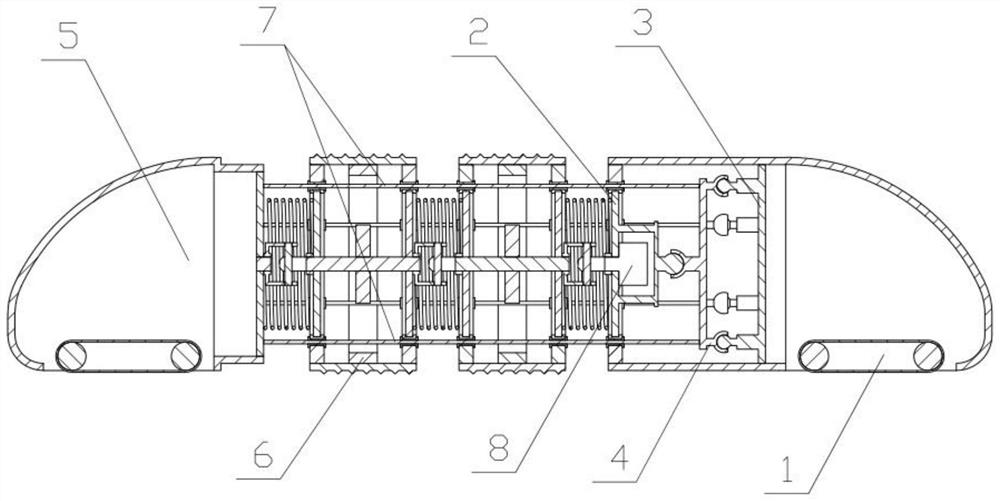
[0042] Combine below Figure 1-16 In this embodiment, a biomimetic snake-shaped robot includes a head support 1, a support frame 2, a pushing mechanism 3, a deflection mechanism 4, a tail support 5, a moving body 6, a stretched wire rope 7 and a power mechanism 8. The head support 1 and the tail support 5 support the rotation of the power mechanism 8. The power mechanism 8 drives multiple moving bodies 6 to rotate while rotating, and the multiple moving bodies 6 are pushed by walking spirals 6-7 when rotating. The device moves. Since the multiple walking spirals 6-7 are circular, each walking spiral 6-7 on the multiple walking spirals 6-7 can push the device to move as long as there is a contact surface around it. It is suitable for traveling through soft ground, pipelines or building gaps in earthquake rescue. The relative length of the multiple tensile steel ropes 7 through the multiple moving bodies 6 is changed by the deflection mechanism 4 to squeeze the compression spring...
specific Embodiment approach 2
[0049] Combine below Figure 1-16 This embodiment will be described. This embodiment will further explain the first embodiment. The head support 1 includes a head support body 1-1, a mounting cylinder 1-2, and crawler wheels I1-3, and a head support body 1-1 The upper part is fixedly connected with a mounting cylinder 1-2, the deflection bottom plate 4-1 and the support ring I2-1 are both fixedly connected in the mounting cylinder 1-2, and the crawler wheel I1-3 is rotatably connected to the lower part of the head bracket body 1-1. Side; the head support body 1-1 plays a role in supporting and rotating the device to a certain extent. The support ring Ⅱ6-1 is rotated and limited by the contact between the head support body 1-1 and the ground. The extension wire rope 7 limits the rotation direction of the support ring Ⅱ6-1 to ensure that the support ring Ⅱ6-1 will not rotate along with the walking spiral 6-7. The crawler travel wheel I1-3 reduces friction, and the crawler travel ...
specific Embodiment approach 3
[0051] Combine below Figure 1-16 This embodiment will be described. This embodiment will further explain the second embodiment. The head support body 1-1 is provided with a visual sensor and a thermal sensor, and both the visual sensor and the thermal sensor are connected to the computer through signals; During rescue or walking in the pipeline, the visual sensor and thermal sensor can collect information and transmit it to the computer.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com