
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A kind of unmanned aerial vehicle flight control method and device
A flight control and drone technology, applied in the field of drones, can solve the problem of drones easily falling into the safe range, and achieve the effects of avoiding entering the safe range, improving safety, and reducing the buffer range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
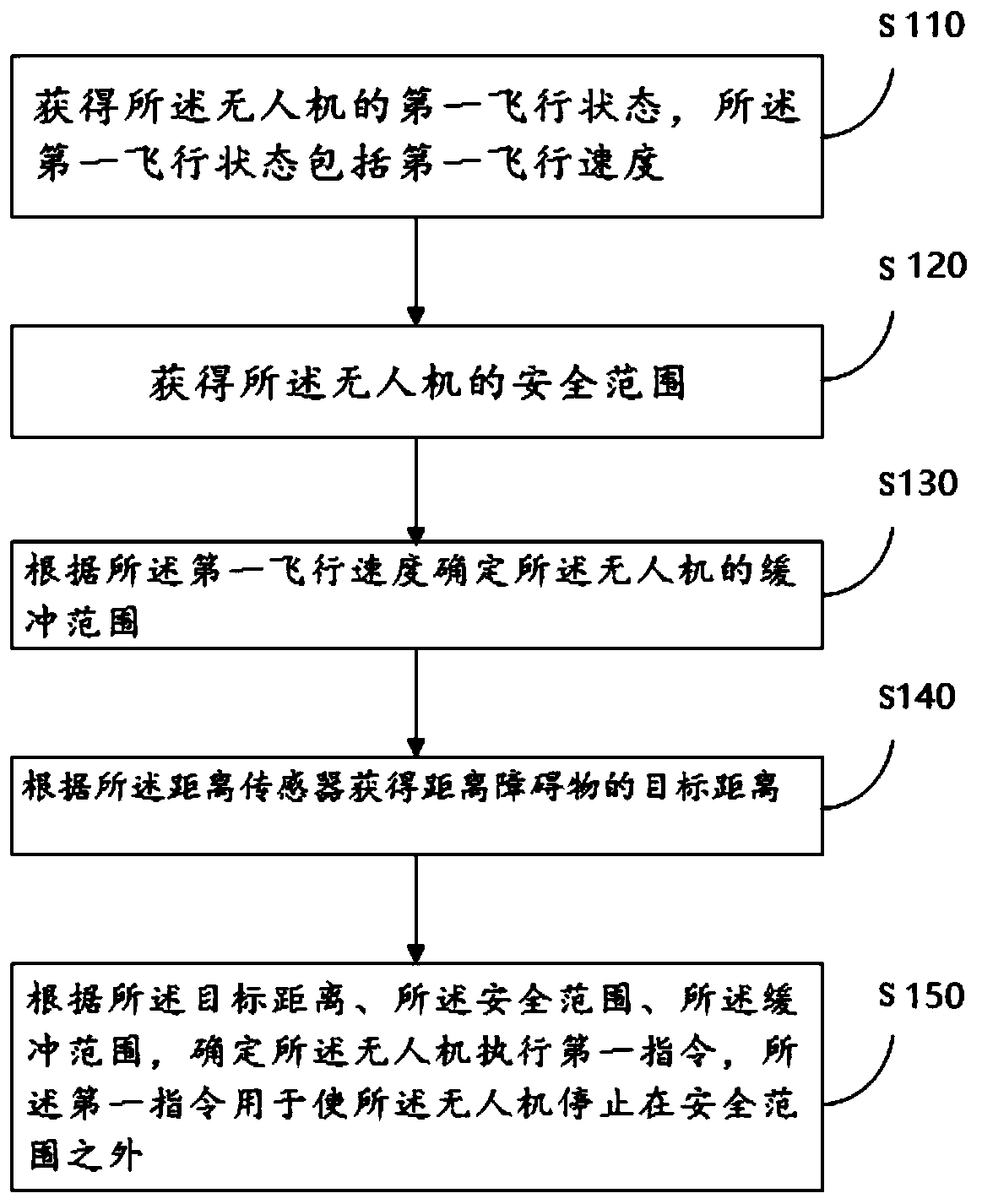
[0031] Such as figure 1 As shown, a UAV flight control method provided in the embodiment of the present application, the method includes:
[0032] Step 110: Obtain a first flight state of the drone, where the first flight state includes a first flight speed.
[0033] Specifically, when the UAV is in a flying state, the flight speed of the UAV during normal flight is obtained. The flight state may be the flight state in the case of performing a variety of different tasks, for example: map surveying, forest surveying, emergency rescue and disaster relief, logistics express delivery, high-altitude photography and other situations. Generally speaking, the first flight state of the drone may include a variety of state information, such as flight speed, such as flight altitude, such as the operating conditions of various devices in flight, and the like. In the embodiment of the present application, in step 110, the first flight speed information of the UAV is obtained.
[0034] S...
Embodiment 2
[0048] The embodiment of the present application also provides a UAV flight control method, the method also includes:
[0049] judging whether the UAV flies into the safe range; when the UAV does not fly into the safe range, execute the first instruction;
[0050] When the unmanned aerial vehicle flies into the safe range, the second instruction is executed, and the second instruction is used to instruct the unmanned aerial vehicle to fly out of the safe range, specifically, when the unmanned aerial vehicle is executing When the first instruction was completed, it still flew into a safe range. For example, due to the increase in gravity caused by the drone’s load, the buffer range was too small, which made the buffer distance insufficient, causing the drone to fly into a safe distance. Or because the UAV is flying downwind due to climate reasons, it can also cause the UAV to fly into a safe range. Under the above circumstances, it can be determined that when the UAV flies int...
Embodiment 3
[0052] The embodiment of the present application also provides a UAV flight control device, the UAV includes a distance sensor, wherein the device includes:
[0053] A first obtaining unit 11, the first obtaining unit 11 is used to obtain a first flight state of the drone, the first flight state includes a first flight speed;
[0054] A second obtaining unit 12, the second obtaining unit 12 is used to obtain the safety range of the drone;
[0055] A first determination unit 13, the first determination unit 13 is configured to determine the buffer range of the UAV according to the first flight speed;
[0056] A third obtaining unit 14, the third obtaining unit 14 is used to obtain the target distance from the obstacle according to the distance sensor;
[0057] The second determination unit 15 is configured to determine that the UAV executes a first instruction according to the target distance, the safety range, and the buffer range, and the first instruction is used to make T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com